
 Abstract
Abstract
- This paper describes how a work group and a newcomer mutually adapt. We study two types of simulated groups that need an extra worker, one group because a former employee had left the group and one group because of its workload. For both groups, we test three conditions, newcomers being specialists, newcomers being generalists, and a control condition with no newcomer. We hypothesise that the group that needs an extra worker because of its workload will perform the best with a newcomer being a generalist. The group that needs an extra worker because a former employee had left the group, will perform better with a specialist newcomer. We study the development of task allocation and performance, with expertise and motivation as process variables. We use two performance indicators, the performance time of the slowest agent that indicates the speed of the group and the sum of performance of all agents to indicate labour costs. Both are indicative for the potential benefit of the newcomer. Strictly spoken the results support our hypotheses although the differences between the groups with generalists and specialists are negligible. What really mattered was the possibility for a newcomer to fit in.
- Keywords:
- Task Allocation, Group Processes, Psychological Theory, Small Groups, Self-Organisation
Introduction
- 1.1
- Whereas much is known on the performance of workgroups in relation to the skills and motivation of its members, less is known on how group performance is affected by adding a new member (Choi and Levine 2003). This is due to the fact that a newcomer is often hired in situations where group performance should be enhanced, and adding a new group-member may result in a dynamical rearrangement of tasks, which is hard to study in the field. In this paper we use an agent-based model to explore under what conditions a newcomer contributes to a better group performance. More precisely we study how group performance is related to the process of task allocation when a newcomer enters the group. We will especially address the question under what conditions of group organisation it is favourable to hire a generalist, which can be used to perform many different tasks at an acceptable level, or hiring a specialist, who has much experience in a limited set of tasks. Such questions pertain to the impact of turnover. Turnover refers to team members entering or leaving a workgroup or organisation, which often is associated with changes of performance and expertise (e.g.Levine, Moreland, Argote, and Carley 2005). These changes may have positive effects on performance, for instance when newcomers are highly skilled, but also may be negative if it disturbs a team's steady state (Levine et al. 2005). Moreover, the recruitment, selection, training and socialization in general of newcomers may be costly to firms (Glebbeek and Bax 2004), although prevention of turnover may also be expensive (Glebbeek and Bax 2004).
- 1.2
- Literature mostly focuses on turnover being a dependent variable, whereas studies about the effects of turnover have been less emphasised (Glebbeek and Bax 2004; Dineen and Noe 2003). Further, most of these studies only looked at outcome variables such as performance or transactive memory system (e.g.Levine et al. 2005), while neglecting the effects on group dynamical processes (Dineen and Noe 2003). Others have studied process variables with membership change being an independent variable, but these studies either focus on conflict (O'Connor, Gruenfeld and McGrath 1993) or learning (Carley 1992), but do not involve task (re)allocation processes (e.g.Marks, Mathieu, and Zaccaro 2001). Studies that have included team processes as an outcome of turnover mostly focus on general mechanisms regarding membership change (Dineen and Noe, 2003; Marks et al. 2001) or team processes in general (Arrow and McGrath 1995) but focus less on the underlying processes such as social interactions. Moreover, although literature about person-job fit focuses on individual and organisational characteristics (e.g.Edwards 1991; Kristof 1996), it does not concern task allocation processes related to the mutual adaptation of newcomers and teams.
- 1.3
- Thus, whereas the effects of separate variables - or limited combinations - have been empirically investigated, it is difficult to derive empirically based conclusions on how the combination of these variables affects the performance and its underlying processes of task allocation when a newcomer enters the team. Social simulation offers a methodology to systematically explore a large number of conditions, and thus may contribute to deriving such conclusions (e.g.Gilbert and Troitzsch 1999). In this paper, by conducting experiments in which we vary characteristics of newcomers and tasks, we explore how newcomers affect the performance of a team and how a team and a newcomer mutually adapt. We study the effects of two types of newcomers, generalists and specialists, on two types of self-organising task groups. The first task group represents a project team in which the whole project was allocated to all members. This team needs an extra member because of its high workload. The second task group represents a project team that recently lost one of its members. This team needs an extra member to fill in the gap that was created by the loss of his predecessor. We used to two types of performance indicators. First we use the performance time of the slowest agent to represent the speed of the group. Second, we use the sum of performance time of all agents to represent the labour costs. Both are indicative for the potential benefit of the newcomer.
- 1.4
- In the first section of the paper we focus on the theories and models we use and their formalisation, which form the basis of WORKMATE, the simulation program that we developed to study self-organising processes of task allocation (Zoethout, Jager, and Molleman 2006a; 2006b). WORKMATE is used to test hypotheses concerning the relation between different types of newcomers, task allocation processes, and performance. The second section describes the experimental design and the parameter settings. Next we will describe the results and we end up with conclusions and a discussion.
 The model
The model
- 2.1
- WORKMATE is a deterministic discrete event based simulation program developed in DELPHI6 for simulating self-organising processes of task allocation. Self-organising processes of task allocation refer to the way in which a group task is allocated by the group members themselves. WORKMATE is an elaborated version of the simulation program that we used for experiments on the emergence of job rotation (Zoethout et al. 2006a), the relation between task variety and coordination time (Zoethout et al. 2006b) and the relation between task dynamics and performance (Zoethout, Jager and Molleman, 2008). In this section we shortly describe the theoretical framework WORKMATE is based on. The Windows executable WORKMATE program can be downloaded here.
The multi agent system
- 2.2
- Within WORKMATE, an agent is a simple model of a human being with properties that are necessary to perform tasks. A task is considered as a set of actions, e.g. washing and drying, in such a way that each action is related to a single skill (Hunt 1976; Weick 1979; Tschan and von Cranach 1996). During every time step, each agent performs one action, e.g. washing a single cup. The individual properties of the agents are represented as a set of skills. Each skill has two variable components: expertise and motivation that are important components determining group performance (Wilke and Meertens 1994; see also Steiner 1972). Skills are passive when they are not used and become active when they are needed for the performance of a task. When activated, a threshold function determines whether the agent actually wants to perform a particular action. This function implies that only if both expertise i.e. well enough, and motivation, i.e. nice enough, are higher than their thresholds, the agent actually wants to perform the particular action. In this way every agent chooses a subset of actions he would like to perform. If the choices of all agents imply that there are more agents sharing the same preference than there are actions to perform, the agents start influencing each other. This implies that the agents are trying to change the preferences of the other agents in such a way that the other agents will reach a complementary state with respect to their own. For a good understanding of the current paper, it is not necessary to understand the details of this process. An interested reader, however, can find the specific details in Zoethout et al. (2006b). The influence of the agents is based on their expertise and motivation of the particular skill, which implies that the agent with the highest expertise and/or motivation is more likely to perform its most preferred action. Agents can only be influenced if they are able to perform a particular action, i.e. if their expertise is higher than the accompanying threshold. The process ends as soon as the number of agents with a preference for a particular action is equal to the number of available actions.
Task and task performance
- 2.3
- Each action has to be performed a number of times, i.e. cycles, before a task is finished. In this way, a task can be represented as a matrix of actions (what) and cycles (how often). For example, if the dishes consist of 10 cups, the matrix consists of 2 actions, i.e. washing and drying, and 10 cycles, for every cup. The order in which the task is performed may vary: the agents may perform the task cycle by cycle, action by action, or something in between. Two general allocation types, generalisation, i.e. cycle by cycle, and specialisation, i.e. action by action, bound the possible ways a task can be allocated.
- 2.4
- We use the concept of time step to describe the specific order in which a task is performed. For instance, a group of specialists performs the task in the following order (see Table 1);
time step 1(t1): agent 1 performs action a1, agent 2 performs action b1, agent 3 performs action c1. At time step 2 (t2), agent 1 performs action a2, etc.Table 1: An example of task allocation action/cycle 1 2 3 a t1: agent 1 t2: agent 1 etc. b t1: agent 2 etc. etc. c t1: agent 3 etc. etc. - 2.5
- The number of time steps it takes to finish a task can be described as a product of actions and cycles divided by the number of agents rounded to the next integer. For instance, to finish the task as depicted in Table 1, it takes 3 time steps for 3 agents (9/3) , 5 time steps for 2 agents (9/2), and 9 time steps for 1 agent. Hence, it takes fewer time steps to perform a task when more agents are involved. This means that the concept of time steps allows for expressing the performance of a team in terms of time needed to complete the task.
- 2.6
- The actual performance of the individual agents is based on a function of expertise and motivation, being the most important components that determine group performance (Steiner 1972; Wilke et al. 1994). Expertise and motivation may change as a result of task allocation and task performance. This implies that agents will increase the expertise of the skills they use and forget the skills they do not use. Furthermore, motivation may change, i.e. the agents become bored after performing a particular action for a longer time and recover from it as soon as they stop (see also Zoethout et al 2006a; 2006b).
- 2.7
- Both expertise and motivation are defined in terms of the time it takes to perform a task: the higher the expertise or motivation, the sooner the task will be finished. Furthermore, we define a minimal time to complete an action, taction, which is equal to the actual time it takes to perform the action at a maximal rate of expertise and motivation. The actual performance time of a single agent, t per_agent can therefore be expressed as:
(1a) λ represents a parameter that determines the balance between expertise and motivation. n represents the number of actions that a task consists of. In our experiments we assume that expertise and motivation have the same effect on the performance time. This means that λ is set on 0.5.
- 2.8
- Since the actions of a task consist of multiple cycles, the total contribution of a single agent to the whole task can be expressed as:
(1b) k represents the number of cycles that a task consists of. t cell_ij represents the specific cell of the task matrix as represented in Table 1. eij and mij represent the expertise and motivation at the moment the action of a particular cell is being performed.
- 2.9
- In the present study, the agents perform the actions simultaneously and they keep on performing as long as there are still actions left to do. The task is being finished when all cycles of all actions have been completed.
- 2.10
- In the present study we compare the performance time of the group to the labour costs. Since the actions the task consists of are not interdependent, performance time of the group can be measured by taking the maximum of the performance time of the individual agents, meaning that the slowest agent determines the performance of the group:

(1c) The labour costs ( S) can be indicated by using the sum of the performance time of the individual agents, since this expresses the potential benefit of the newcomer:

(1d) Learning, forgetting, boredom and recovery
- 2.11
- When all actions are being allocated, the allocation process is being completed and the agents start performing the task. As a result of this, their expertise may change, i.e. the agents will increase the expertise of the skills they use and forget the skills they do not use. Furthermore, the motivation may change, i.e. the agents become bored after performing a particular action for a longer time and recover from it as soon as they stop.
- 2.12
- An important characteristic of most learning curves is that they reach a maximum asymptotically (Nembhard 2000). Therefore, we define learning by means of the relations among expertise ( e) at a certain time ( t), expertise in the future ( t+1), the maximum expertise ( emax), and a parameter β [0,1] that determines the learning speed:
(2a) Forgetting can be described as the inverse of learning (Nembhard 2000) . Since forgetting only applies to skills that are not used, motivation does not play a role here. Therefore, forgetting can be described as the inverse of formula (2a):
(2b) where δ[0,1] determines the forget speed.
- 2.13
- In real life an enormous range exists between learning and forgetting speed of different tasks. Motor tasks such as truck driving are, once learned, never forgotten, whereas others, such as sorting, need to be maintained. Therefore, in the experiments, the balance between learning and forgetting speed is chosen on rather practical grounds instead of being based on empirical evidence. This holds that the agents are able to forget with a speed that is high enough to produce interesting dynamics, whereas a skill that has not been used for a time is not immediately forgotten.
- 2.14
- Motivation curves can be described by applying the same characteristics: a maximum that is reached aymptotically, and recovery as the inverse of boredom. This means that formula (2b) describes the motivational decrease related to boredom and formula (2a) represents the motivational increase related to the recovery from boredom. In this case the parameters β and δ respectively describe the recovery and the boredom speed.
Model and hypotheses
- 2.15
- We study performance and task allocation in relation to the task and the newcomer. Figure 1 gives an overview of the model in relation to the experiments that we conduct:
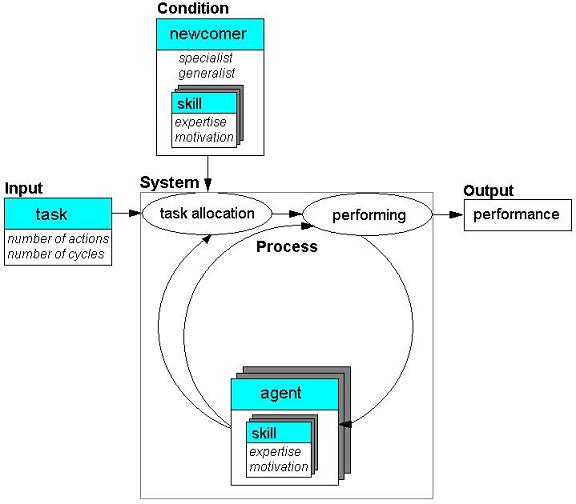
Figure 1. The model - 2.16
- The model can be described as an IMOI (Input-Mediator-Output-Input) model (Ilgen, Hollenbeck, Johnson, and Jundt 2005). The Input is the task. The task allocation (M) takes place on the basis of the expertise and motivation of the individual agents. Task allocation therefore depends on three sets of variables, the values of the task ( number of actions and number of cycles), the values of the newcomer ( expertise and motivation, specialist or generalist) and the values of the agents ( expertise and motivation). On the basis of that, the agents start performing (O), which affects their expertise and motivation, etc.
- 2.17
- We studied two groups of 5 agents, a group performing a task consisting of 5 actions and a group performing a task consisting of 6 actions. The first group represents the project team that needs an extra co-worker because of its workload. 5 agents that perform a task of 5 actions will result in a symmetric task allocation in which the whole task is allocated evenly to all agents. Because of this, it is hard for new members to fit in the existing task allocation process. Therefore, we labelled this condition as no fit. The second group represents a project team that needs extra help because one of its members left the team. 5 agents performing a task of 6 actions will result in a asymmetric task allocation, with a 'gap' in which an additional worker may fit. Therefore, this condition is labelled as fit (see Figures 2a and 2b): Figure 2a (left) and 2b (right): Schematic overview of the allocation process in the no fit (left) and fit (right) condition.
- 2.18
- The green dots represent the agents within the group, the red dot refers to the newcomer. The numbers in the figures are for illustrative purpose only and do not necessarily correspond to the real task allocation. As the figures depict, in the no fit condition the newcomer starts with action 5 whereas in the fit condition the newcomer starts with action 6. Since the task in the fit condition is bigger, i.e. 6 actions, than the task in the no fit condition, i.e. 5 actions, and we wish to compare both conditions, performance time in the fit condition is multiplied with 5/6.
- 2.19
- We studied the effects of two types of newcomers, generalists and specialists. On the basis of these manipulations, we formulated the following hypotheses:
Hypothesis I: In a project team that needs an extra worker because of its workload, group performance will improve more if the newcomer is a generalist than if he is a specialist.
- 2.20
- The rationale behind this hypothesis is based on the notion that a generalist is better able to perform all different 'loose ends' that the workers leave when they reach the end of the task. The contribution of a specialist would be best when the group needs some specific skills. Therefore:
Hypothesis II: In a project team that needs an extra worker because one of its members left the team, group performance will improve more when the newcomer is a specialist on the part that the former member left than if he is a generalist.
Experimental design
-
Variables and design
- 3.1
- The experiment simulates a group of 5 agents who are all specialised in a particular part of the task. Although they do have the skills to perform the other actions as well, they have a clear preference to perform certain actions. Each agent has a different pattern of preferences. All agents are free to self-organise the task allocation whenever they want to, which opens the possibility of task rotation. Task rotation refers to the change of the preferences of the agents as a consequence of their expertise and motivational changes, which implies that they may wish to re-allocate their task.
- 3.2
- We studied two groups, a group performing a task of 5 actions and 200 cycles and a group performing a task of 6 actions and 200 cycles. In the first group, that represents the group that needs an extra worker because of its workload, the agents easily develop a symmetric rotation mechanism. This mechanism holds that each agent rotates between his best and his second best skill. For instance, agent 1 rotates between action 1 and 5, agent 2 between 5 and 4, etc. (see Table 3a). The second group represents the group that needs an extra worker because a former worker had left the group. Because of the extra action, in this group the agents allocate the task in an asymmetric way. Every agent still rotates between his best and his second best skill, but now 5 agents must allocate 6 actions., which leaves some kind of gap. Then the newcomer comes in. In both groups the newcomer starts at the 101 st time step. This offers the group enough time for a rotation mechanism to emerge and specialise further, i.e. to set a steady state that resembles a group of workers existing for a longer period of time.
- 3.3
- For both the no fit and the fit group, we tested seven conditions: Three conditions in which the newcomer is a specialist, with low, moderate, or high expertise and motivation, three conditions in which the newcomer is a generalist, with low, moderate, or high expertise and motivation, and one control condition with no newcomer at all. A specialist is being defined as an agent with skills having all different values, which results in a preference for the best skills. A generalist is being defined as an agent with all skills having the same value for motivation and expertise, which results in the initial absence of a preference for particular skills. Table 2 summarises the research design:
Table 2: Design Newcomer Task 5 actions (no fit) 6 actions (fit)
specialistlow NSL FSL mod. NSM FSM high NSH FSH
generalistlow NGL FGL mod. NGM FGM high. NGH FGH no newcomer NCONTROL FCONTROL - 3.4
- NSL refers to No fit, Specialist, Low expertise and motivation, FGH refers to Fit, Generalist, High expertise and motivation, etc., also in the rest of the text. We choose three conditions for both the specialist and the generalist because these may indicate not only the range in which a newcomer actually leads to a better performance, but the potential (non)linearity of the performance curve as well. We study the effects of these conditions on task allocation being a process variable, and performance being a dependent variable.
Agent values and parameter settings
- 3.7
- The following parameter settings are equal for all experiments:
- The system consists of 5 agents in the control condition + 1 newcomer in the other conditions
- In the no fit condition, a task consists of 5 actions
- In the fit condition, a task consists of 6 actions
- The task consists of 200 cycles
- 3.8
- This small number of agents and actions will help us to comprehend the principles and mechanisms behind the task allocation and task performance of both groups. Each condition runs for 200 cycles, which is sufficient to simulate the processes we want to study.
- The initial values of expertise and motivation are equal
- 3.9
- In all experiments the expertise and motivation of the agents start with the same value. By varying these values, we could have created a wide variety of conditions. For the aim of this study, however, this was not necessary.
- The maxima of both motivation and expertise are set on 25
- The motivation - and expertise thresholds are set on 10
- 3.10
- Since we defined learning and motivational processes by means of a maximum and a threshold, we need a value for both. The actual values are not that important, as long as they create enough space for the agents to develop the processes that we want to study.
- The learning speed is 100
- the forget speed is 3
- The boredom rate is 100, the recovery rate is 100
- 3.11
- A learning speed of 100% offers the possibility to produce noticeable learning effects. A forget speed of 3 has clear effects on task allocation without causing the agents to loose skills that have not been used for a period of time. Since expertise and motivation have equal effects of performance time, we have chosen a boredom rate equal to the learning speed. In analogy tot the initial values of expertise and motivation, we have chosen for equal values for the boredom- and recovery rate
- 3.12
- The newcomer is introduced after 100 time steps. In the condition of no fit, the initial values of the agents are chosen as follows (see Table 3a):
Table 3a: Initial expertise and motivation values of the agents with 1 task of 5 actions in all no fit conditions (NSL, NSM, NSH, NGL, NGM, NGH, and NCONTROL): Skill Agent 1 Agent 2 Agent 3 Agent 4 Agent 5 1 19 15 16 17 18 2 15 16 17 18 19 3 16 17 18 19 15 4 17 18 19 15 16 5 18 19 15 16 17 - 3.13
- The values (expertise and motivation) of the agents are symmetric, i.e. all values are the same for all agents but differ per skill. This holds that the performance of every agent will be about the same, whereas the agents are being specialised in different skills. Since the number of agents matches the number of actions the task consists of, they are more likely to develop a stable rotation mechanism. The initial values of the newcomers are chosen as follows: (see Table 3b):
Table 3b: Values of the newcomer, i.e. Agent 6, in all no fit conditions: Skill NSL NSM NSH NGL NGM NGH 1 12 15 18 14 17 20 2 13 16 19 14 17 20 3 14 17 20 14 17 20 4 15 18 21 14 17 20 5 16 19 22 14 17 20 - 3.14
- As tables 3a and 3b indicate, the specialist newcomer with moderate values, NSM, has the same initial values as agent 2. All skill values of the generalist newcomer are the same.
- 3.15
- The values of the agents in the condition of fit are described in Table 3c:
Table 3c: Values of the agents with 1 task of 6 actions in all fit conditions (FSL, FSM, FSH, FGL, FGM, FGH, and FCONTROL): Skill Agent 1 Agent 2 Agent 3 Agent 4 Agent 5 1 19.5 14.5 15.5 16.5 17.5 2 14.5 15.5 16.5 17.5 18.5 3 15.5 16.5 17.5 18.5 19.5 4 16.5 17.5 18.5 19.5 14.5 5 17.5 18.5 19.5 14.5 15.5 6 18.5 19.5 14.5 15.5 16.5 - 3.16
- Comparing the tables 3a and 3c, we see that although their average expertise and motivation is equal, the initial values of the agents in the no fit conditions differ from the fit conditions. The values in table 3a range from 15-19 whereas table 3c ranges from 14.5-19.5. This difference is related to the number of actions the task consists of. Because of this, the values of the newcomers also differ (see Table 3d):
Table 3d: Values of the newcomers, i.e. Agent 6, in all fit conditions: Skill FSL FSM FSH FGL FGM FGH 1 15.5 18.5 21.5 14 17 20 2 16.5 19.5 22.5 14 17 20 3 11.5 14.5 17.5 14 17 20 4 12.5 15.5 18.5 14 17 20 5 13.5 16.5 19.5 14 17 20 6 14.5 17.5 20.5 14 17 20 - 3.17
- In both the no fit and the fit conditions, the mean of the agents' motivation and expertise in the group is 17. The mean of the newcomer with moderate values is 17 too. The newcomer with low values has a mean of 14, whereas a high skilled newcomer has a mean of 20. As tables 3c and 3d indicate, the order of the values of the moderate specialist newcomer fits within the line of the other agents.
Results
- 4.1
- For every condition we analysed the performance time as well as the task allocation process of both groups. But first we will discuss how the different conditions are related to the performance time (i.e., the moment the task has been completed). This may help us to find an answer to the question which group performs the best under which condition.
Performance time
- 4.2
- As we stated, we use two performance indicators: first we will describe the maximum performance time, i.e. the performance time of the slowest agent. The maximum performance time indicates the time span in which the group performs the task. Second, we will describe the total performance time, i.e. the sum of the performance time of the individual agents. The total performance time indicates the labour costs.
Table 4a shows the performance time of agent 1 to 6 as calculated according to formula1b. Agent 6 represents the newcomer which implies the performance time of 0 in the control condition.Table 4a: Performance time in all no fit conditions: Agent NControl NSL NSM NSH NGL NGM NGH 1 2518 2343 2343 2352 2335 2335 2335 2 2518 2375 2378 2377 2325 2325 2312 3 2518 2338 2338 2338 2324 2324 2324 4 2518 2333 2333 2317 2329 2333 2329 5 2518 2324 2324 2324 2371 2371 2376 6 0 1335 1135 998 1315 1132 1007 Sum 12590 13048 12851 12706 12999 12820 12683 Max 2518 2375 2378 2377 2371 2371 2376
Table 4b shows the performance time of agent 1 to 6 as calculated according to formula1b. As stated in 2.4 the values are multiplied with 5/6.Table 4b: Performance time in all fit conditions: Agent FControl FSL FSM FSH FGL FGM FGH 1 2572 2243 2243 2242 2243 2243 2243 2 2646 2298 2298 2299 2298 2298 2298 3 2606 2280 2280 2280 2279 2279 2279 4 2573 2278 2278 2278 2278 2278 2278 5 2519 2246 2248 2248 2244 2244 2244 6 0 1460 1279 1141 1482 1308 1173 Sum 12916 12804 12625 12488 12823 12649 12514 Max 2646 2298 2298 2299 2298 2298 2298 - 4.3
- On the basis of these tables, we now can depict the maximum performance time in all conditions:
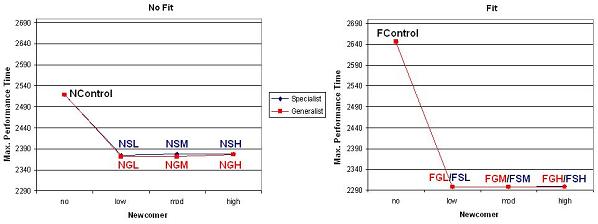
Figure 3a (left) and 3b (right). Maximum performance time of the groups in all conditions with specialists and generalists as newcomers Low refers to a newcomer with low-, mod to moderate, and high to high expertise and motivation. By comparing Figure 3a to 3b, we observe three distinct effects. First, both in the fit and in the no fit conditions, every newcomer leads to a better performance. Second, the no fit conditions show a smaller performance difference with respect to the presence or absence of a newcomer than the fit conditions: Without a newcomer, performance is better in the no fit conditions. With a newcomer, performance is better in the fit conditions. Third, within both the no fit and the fit conditions, the effects of all newcomers are more or less similar. This holds for generalist and specialist newcomers and for newcomers with low, moderate or high expertise and motivation.
- 4.4
- The total performance time for all conditions is depicted in Figure 4a and 4b.
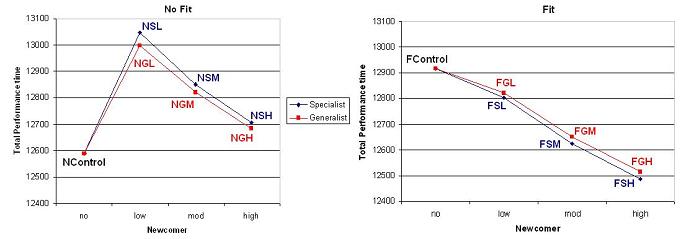
Figure 4a (left) and 4b (right). Total performance time of the groups in all conditions with specialists and generalists as newcomers. The total performance time in the figures is the total of the performance time of all agents, as indicated by formula (1d), which can be seen as an indicator for labour costs.
- 4.5
- By comparing Figure 4a to 4b, we observe three distinct effects. The most important effect holds that in the no fit condition every newcomer implies a higher total performance time whereas in the fit condition every newcomer leads to a lower performance time. Second, there is a small difference between groups with a specialist newcomer compared to groups with a generalist newcomer: in the no fit condition, the group with the generalist newcomer performs better. In the fit condition the group with the specialist newcomer performs better. However, these differences are rather small. Third, the skills of the newcomer show a linear relation with the total performance time: the higher the skill, the lower the total performance time.
- 4.6
- By comparing Figures 3a and 3b that represent the speed of the group and Figures 4a and 4b, that represent the labour costs we observe that both the positive effects of speed increase and labour costs decrease is reached in the fit conditions. The no fit conditions on the other hand lead to less speed increase and increase of labour costs, even if the newcomer is highly skilled. To better understand these findings, we will take a closer look at the underlying processes. In the next section we will therefore discuss some conditions in more detail, by giving an elaborate description of the development of the task allocation process and the performance time.
Underlying processes
- 4.7
- In case there is no newcomer, the task allocation process in the no fit control condition (NCONTROL) is quite simple: First, the agents start with their best skills. Then boredom motivates them to rotate between their best and their second best skills until the task is finished. In the fit control condition (FCONTROL), the agents start in the same way. Based on the values in Table 3c, agent 1 performs action 1 and 6, agent 2 performs 6 and 5, agent 3 performs 5 and 4, agent 4 performs 4 and 3, and agent 5 performs 3 and 2. This implies that each action is performed by 2 agents, except for action 1 and action 2 that are only performed by 1 agent (respectively agent 6 and agent 5). These actions are performed by agents 2,3 and 4 after these agents have completed their best and second best action. Then these three agents start helping agent 6 and agent 5 to complete action 1 and 2. Since these three agents are less skilled in performing the remaining actions, performance time increases. Thus, the performance time with no newcomer is lower (i.e. performance is better) in the no fit condition than in the fit condition.
- 4.8
- In the other conditions, in which a newcomer enters the system after 100 time steps, the task allocation process can be described by using 3 stages. In the first stage, the agents start specialising in a particular action until boredom stimulates them to rotate. In fact, this stage describes what happens with a group with no newcomer (NCONTROL and FCONTROL). In the second stage the newcomer comes in and starts performing. This implies that not all actions are finished at the same time. Stage 3 starts as soon as at least one action has been completely finished and the task must be re-allocated. After re-allocating the task, the agents proceed until another action has been finished, etc. In this serial way the agents continue until all actions have been completed.
- 4.9
- In this last stage, there is a remarkable difference between the no fit condition and the fit condition that holds for all conditions with a newcomer. In the no fit condition, the newcomer starts with his best two skills (or with his first two when he is a generalist) more or less in the same way as the other agents. Because the actions that the newcomer performs are also performed by some other agents as well (see Table 3a and 3b) these actions are finished first. From that point on, the newcomer switches to other actions to help the rest of the group. In the fit condition, the newcomer starts with his best two skills (or with his first two when he is a generalist). These skills correspond to the actions that were only performed by one agent instead of two. Since a newcomer by definition starts later than the other agents, the newcomer's actions are finished later than the actions of the other agents. From that point on, the other agents have to switch to these actions to help the newcomer (see also Figures 2a and 2b).
- 4.10
- Hence, in the no fit condition, the newcomer first helps agent 2 because they share a preference for the fourth and fifth skill. Then the newcomer and agent 2 help agent 3 etc. This results in a process in which the actions are finished stepwise. Because of this, the task must be re-allocated a number of times. In the fit condition, by definition the newcomer starts later. Because of this, the other agents help the newcomer to finish with action 6, which results in a re-allocation process that is much simpler.
- 4.11
- This means that in the no fit condition, in the third stage, the agents have to re-allocate more often than in the fit condition. As we will explain below, this causes the main difference in performance time of both conditions. Although the 'peaks' in the third stage, representing the worst agent, are about the same in both conditions, we see a clear difference between the no fit and the fit condition during the third stage (see Figures 5a, 5b and 5c).
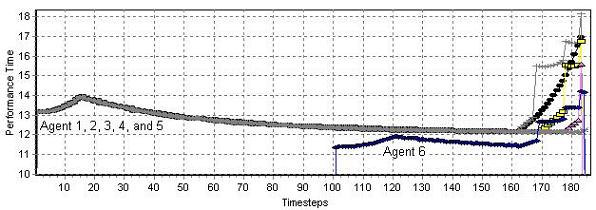
Figure 5a. Performance development in condition NSH: no fit, high specialist - 4.12
- Figure 5a depicts the performance time (y-axis) at every time step (x-axis), for all agents. During the first stage, all agents have the same performance time, which results in a single graph. From the 100 th time step, the newcomer (blue graph) enters the group, who initially performs better than the rest of the group because we have depicted the condition with a highly skilled newcomer (NSH). However, from the third stage (162 th time step), it turns out that the newcomer only negatively influences the performance. This latter stage is depicted in Figure 5b:
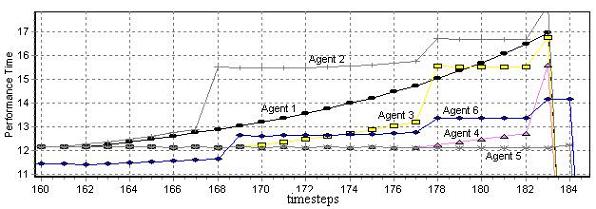
Figure 5b. Performance development from the 160 th timestep in condition NSH. - 4.13
- The newcomer, agent 6, caused action 5 to be finished first, i.e. at the 162 nd timestep. The two agents that were involved in this action, agents 1, 2, and the newcomer now only perform one action. As a result of boredom, performance time of these agents increases. At the 168 th timestep, action 4 is finished. Three agents were involved in this, agents 2, 3, and the newcomer. Agent 2, who initially started with actions 4 and 5 must start with another action he is less skilled in. Together with the newcomer he starts with action 3. As a consequence, their performance time increases. Agent 3 now proceeds with only action 3. Performance time increases slightly because of boredom. At the 177 th timestep action 3 is being finished and the agents involved, agents 2, 3, 4, and the newcomer must shift actions again. Thus, in the third stage, the help of the newcomer has two negative consequences: first, it causes the other agents to shift to other actions they are less skilled in, which results in a strong increase of performance time. Second, it disturbs the shifting process the agents developed to reduce their boredom, which results in motivation loss causing a mild increase of performance time.
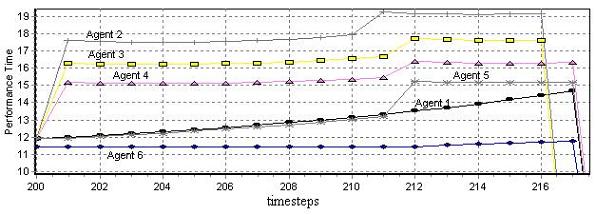
Figure 5c. Performance development in condition FSH: fit, high specialist - 4.14
- Figure 5c shows the performance development in the fit condition during the third stage after the 200 th timestep. This stage starts later than in the no fit condition because here the task consists of 6 actions instead of 5. The performance peaks are about as high as in the former condition, NSH. However, as Figure 5c shows, the agents do not switch that often. At the 200 th timestep, actions 3, 4, 5, and 6 have been finished. The agents involved, agents 2, 3 and 4, must choose another action in which they are less skilled resulting in a sudden increase in performance time. Agent 1 and 5 continue with a single action resulting in a slight increase of performance time due to boredom. Because by definition the newcomer starts later than the other agents, he continues with actions 1 and 2. At the 211 th timestep action 2 has been finished causing a slight performance time increase of all agents helping the newcomer to finish his actions. Action 1 is finished last. Thus, every agent simply continues to work on his preferred actions until the actions are finished. Then, they start helping the newcomer with the remaining actions. .If we look at the third stage more closely, we observe that it takes less time to finish this stage in the fit condition (17 timesteps * 5/6 = 14 than in the no fit condition (24), which results in a better performance.
- 4.15
- Thus, concerning the first finding, in the no fit condition, the contribution of a newcomer is dual. First, when he enters the group, his expertise and motivation lead to a better performance because his performance time is lower than the average group performance (i.e., he has high expertise and motivation). Second, during the last stage of task performance, he contributes to the 'loose ends' of those tasks that still have to be completed. In the fit condition, during the last stage the newcomer simply continues with what he was doing (see also Figure 5d). Therefore, he does not contribute to finishing the loose ends by re-allocating his actions, and therefore is not using his worst skills. Besides, this last disturbed stage takes longer in the no fit condition than in the fit condition.
- 4.16
- Figure 5d depicts the performance time in the no fit condition when the newcomer is a generalist:
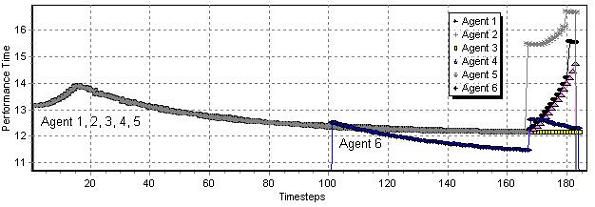
Figure 5d. Performance development in condition NGH: no fit, high generalist - 4.17
- Instead of the initial increase, the performance time of the generalist newcomer immediately decreases: Because all his skills are identical he immediately starts rotating between two actions instead of building up boredom during the first 15 time steps. Further, because the generalist starts with lower values (20, 20) than the specialist (22, 21) in condition NSH, in the second stage (100 th -167 th time step), performance time is somewhat higher. However, the generalist newcomer is able to compensate for this by working on the different loose ends a lot better than the specialist newcomer in the third stage:
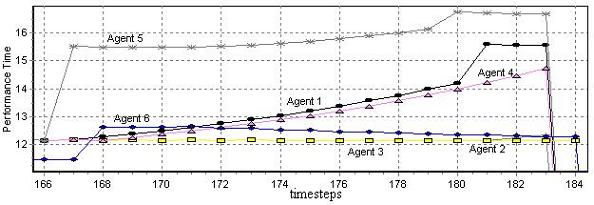
Figure 5e. Performance development in condition NGH from the 166 th timestep: no fit, high generalist - 4.18
- Figure 5e shows that after starting with a new action at the 168 th timestep, the performance time of the newcomer slightly decreases. The other agents show the same behaviour as depicted in Figure 5b, a mixture of sudden increase of performance time due to the use of low skills and slight increase due to motivation loss.
- 4.19
- The benefit of the generalists in the last stage does not apply to the fit condition because, just as we explained at Figure 5c, the newcomer simply proceeds in what he is doing. Instead, the influence of the newcomer is only determined by his expertise and motivation in the second stage. Therefore, in the fit condition, a specialist newcomer performs better than a generalist newcomer, simply because he starts with a better skill. However, this benefit is quite small. The most important components that influence group performance time are the expertise and motivation of the newcomer. This explains the small differences in both the fit and no fit conditions between the group with a specialist and the group with a generalist.
Conclusion and discussion
- 5.1
- On the basis of the results we may draw the following conclusions: first of all, by looking at the maximum performance time as depicted in Figure 3a and 3b, we must conclude that every newcomer leads tot a better performance whereas it makes nearly no difference whether the newcomer is a generalist or a specialist, or highly or lowly skilled and motivated. Since the performance differences with and without a newcomer are larger in the no fit condition, we can conclude that each condition benefits from a newcomer, but the fit condition benefits more. However, that conclusion is only drawn on the basis of the maximum performance time. On the basis of the total performance time, as depicted in Figure 4a and 4b, we have to draw another conclusion: in the no fit condition a newcomer does not contribute at all, but only hinders the performance. Only in the fit condition, the newcomer contributes positively. Here the expertise and motivation do matter: performance time decreases when expertise and motivation increase.
- 5.2
- By comparing the maximum performance time, that indicates speed, and the total performance time, that indicates labour costs, we can conclude that in the fit condition a newcomer is always beneficial: the task will be completed earlier and the labour costs will decrease. Whereas the first is quite logical: more hands imply less work, the latter does sound somewhat counterintuitive: by adding extra personnel, labour costs will decrease. We explained this by looking at the task allocation process: In the no fit conditions the newcomer starts performing the same actions as one of the other agents in the group (let us say agent x). Because of this, these particular actions are finished sooner than the rest of the task. As a result, both the newcomer and agent x start helping agents y. This implies that the newcomer, agent x and agent y are finished with their part of the task before agent z., etc. As a final result, all agents eventually use skills that are not their first, second or even third choice, which ends up in a worse performance. This is more or less the allocation process that Figures 6a and 6b depict. In the fit conditions the newcomer starts with an action that differs from the actions of the other agents. Instead of being finished before the other agents, the newcomer is being finished later, simply because he started later. Because of this, after finishing their own actions, the other agents start helping the newcomer until the task is finished. As Figure 6c indicates, this leads to an allocation process that is much simpler, whereas the agents are not forced to use even their worst skill as in the no fit conditions.
- 5.3
- But how do these findings relate to our hypotheses? Our hypotheses as formulated in 2.4 are based on the general idea that generalists may adapt more easily to a no fit condition because this demands a worker being able to work on multiple actions. A specialist on the other hand would be better able to fill the 'gap' in the fit condition. However, the results indicate that it does not matter much whether the newcomer is a specialist or a generalist. Therefore, on the basis of the results, hypothesis I and II we conclude that these hypotheses receive only marginal support. Much more important is the possibility to fit in the group. Our findings suggest that the characteristics of a newcomer are less important than the structure of the team: if the team has a high workload, extra hands will only be beneficial when there is some 'gap 'for the newcomer to fit in to. In that case not only the work will be finished sooner, but labour costs will decrease as well. Without such a gap, a newcomer is only beneficial in cases with deadlines, where speed is more important than labour costs.
- 5.4
- From the initial settings of the agent values as stated in Tables 3a-3d it appears that the agents in the fit conditions, including the newcomers, have a slight advantage of 0.5 regarding their initial expertise and motivation. However, this advantage does not explain the performance differences as stated in Figures 3a and 3b, because these figures actually depict that performance differences in the fit conditions do not matter at all.
- 5.5
- Although we conclude that the differences between specialists and generalists are negligible, one could wonder whether this conclusion still stands in a setting with higher initial differences between specialists and generalists. The chosen range of 0 to 25 and a threshold of 10, combined with the learning speed might indicate such small differences. With a broader range and/or a slower learning speed, we could find possible conditions that will show larger differences.
- 5.6
- The results show that the more often a task is re-allocated, the lower the performance will be. Although this correlation is intuitively correct, we did not take the concept of coordination costs into account. If we would add this concept to the model, not only would the model itself be more realistic, the effects that we found would be larger as well. Apart from that, we did not limit our experiments by using agents with cognitive properties only, but used a model in which we combined a simplified cognitive architecture with variable motivational states. Although this does not necessarily mean that the results of this study can easily be generalized to real life events, the combination of cognitive and motivational properties may result in more realistic dynamics than a model that only focuses on cognitive properties.
- 5.7
- In our experiments, the task rotation process is an emergent phenomenon (see alsoZoethout et al., 2006a). In practice, workers may decide when to rotate in advance. Although it is very tempting to enhance the cognitive properties of the agents to give them the possibility to generate rotation rules, we think that this needs a substantial elaboration of the model. And since enhanced realism easily leads to more model complexity, this would imply a very simple mechanism that would enable the agents to come up with such rules.
- 5.8
- With respect to the realism of the task model we used we have to admit that the model is rather simple. In real live, most tasks require a specific order in which the sub-tasks need to be executed. Furthermore one might state that every task contains elements that everyone likes or dislikes, which implies that motivation is dependent on both the worker and the task. Both of these components will have important consequences for the allocation process. Future research must point out these consequences in greater detail.
- 5.9
- Furthermore, the experiments are conducted with the λ parameter fixed at 0.5, indicating an equal contribution of expertise and motivation to performance. When varying this parameter, we would gain more insight regarding the specific contribution of expertise and motivation to the allocation process and task performance. In addition to this, we assign different λ values to the individual agents, indicating differences between goal oriented and process oriented agents.
- 5.10
- On the basis of this paper we may conclude that the combination of work group properties and task structure, as well as the task allocation process, are components that seem to be more important than characteristics of newcomers. In general, the insights of our study may contribute to the existing literature of turnover, especially to the studies that focus on team processes regarding newcomers (Dineen et al. 2003; see alsoMarks et al. 2001; Arrow et al. 1995). But more important, by using simulation studies to address research questions regarding task performance, we are very well able to describe the underlying processes in detail which remains difficult in daily live.
References
-
ARROW, H. and McGrath, J.E. (1995), "Membership Dynamics In Groups at Work: A Theoretical Framework", Research in Organizational Behavior, 17, 373-411.
CARLEY, K. (1992), "Organizational Learning and Personnel Turnover", Organizational Science, 3 (1), 20-46. [doi:10.1287/orsc.3.1.20]
CHOI, H.S. and Levine, M. (2004), "Minority influence in work teams: The impact of newcomers", Journal of Experimental Social Psychology, 40, 273-280 [doi:10.1016/S0022-1031(03)00101-X]
DINEEN, B.R. and Noe, R.A. (2003), "The Impact of Team Fluidity and Its Implications For Human Resource Management Research and Practice", Research in Personnel and Human Resources Management, 22, 1-37. [doi:10.1016/s0742-7301(03)22001-6]
EDWARDS, J.R. (1991), "Person-Job Fit: A Conceptual Integration, Literature Review, And Methodological Critique", in C.I. Cooper and I.T. Robertson (eds.) International Review of Industrial and Organizational Psychology, Vol. 6, Chichester, UK: John Wiley and Sons Ltd.
GLEBBEEK, A.C., and Bax, E.H. (2004), "Is High Employee Turnover Really Harmful? An Empirical Test Using Company Records", Academy of Management Journal, 47 (2), 277-286. [doi:10.2307/20159578]
GILBERT, N. and Troitzsch, K.G. (1999), Simulation for the social scientist, Buckingham: Open University Press.
HUNT, R.G. (1976), "On the Work itself: Observations Concerning Relations between Tasks and Organizational Processes", in: E.J. Miller (ed.) Task and Organization, Tavistock Institute of Human Relations, London: John Wiley and Sons.
ILGEN, D.R., Hollenbeck, J.R. Johnson, M. and Jundt, D. (2005), "Teams in Organizations: From Input-Process-Output Models to IMOI Models", Annual Review of Psychology, 56, 517-543. [doi:10.1146/annurev.psych.56.091103.070250]
KRISTOF, A.L. (1996), "Person-Organization Fit: An Integrative Review Of Its Conceptualizations, Measurement, And Implications", Personnel Psychology, 49, 1-49. [doi:10.1111/j.1744-6570.1996.tb01790.x]
LEVINE, J.M., Moreland, R.L., Argote, L., and Carley, K.M. (2005), "Personnel Turnover and Team Performance", United States Army Research Institute for the Behavioral and Social Sciences, Technical Report 1157.
MARKS, M.A., Mathieu, J.E. and Zaccaro, S.J. (2001), "A Temporally Based Framework and Taxonomy of Team Processes", Academy of Management Review, 26 (3), 356-376.
NEMBHARD, D.A (2000) The Effects of Task Complexity and Experience on Learning and Forgetting: A Field Study, Human Factors, 42(2), 272-286. [doi:10.1518/001872000779656516]
O'CONNOR, K.M., Grünfeld, D.H. and McGrath, J.E. (1993), "The Experience and Effects of Conflict in Continuing Work Groups", Small Group Research, 24, 362-382. [doi:10.1177/1046496493243005]
STEINER, I.D. (1972), Group process and productivity, New York and London: Academic Press, Inc.
TSCHAN, F. and Cranach, M. von (1996), "Group Task Structure, Processes and Outcome", M.A.West (Ed) Handbook of Work Group Psychology, New York: John Wiley and Sons Ltd.
WEICK, K. (1979), The Social Psychology of Organizing, 2nd ed., New York: McGraw-Hill,
WILKE, H.A.M. and Meertens, R.W. (1994), Group Performance, London, New York: Routledge.
ZOETHOUT, K., Jager., W. and Molleman, E., (2006a), "Simulating the Emergence of Task Rotation", Journal of Artificial Societies and Social Simulation, vol. 9 (1) 5, https://www.jasss.org/9/1/5.html
ZOETHOUT, K., Jager., W. and Molleman, E., (2006b), "Formalizing Self-Organizing Processes of Task Allocation", Simulation Modelling Theory and Practice, 14, 342-359, special issue on simulating organisational processes. [doi:10.1016/j.simpat.2005.09.004]
ZOETHOUT, K., Jager., W. and Molleman, E., (2008), Tasks Dynamics in Self-Organising Task Groups: Expertise, Motivational, and Performance Differences of Specialists and Generalists, Autonomous Agents and Multi-Agent Systems, 16, 75-94. [doi:10.1007/s10458-007-9022-9]