
Introduction
The concept of social production and management of urban ecosystems may be understood as the generation of new physical or relational situations, by constructing, transforming or eliminating physical objects and/or relational objects with the objective of ensuring, in the new produced situations, the fulfillment of their social and environmental functions (Ortiz 2010); (Pelli 2007; 2010). This includes the citizen participation in the process of urban planning and transformation, articulating the different involved agents (government, institutions, technicians, citizens), forming a network structured and supported by mechanisms and tools that allow the equal distribution of power in the decision making, so that all agents can participate and dialogue actively in the whole process of a certain project, from its planning to its management, as discussed by Dimuro (2010), Dimuro & Jerez ( 2010; 2011).
The social production and management of urban ecosystems contribute to the strengthening of community practices, to the increasing of responsibility for a collective project, to the exercise of democracy, to the development of more supportive actions, including both productive and economic issues, as well as environmental issues. See also the discussions presented by Dimuro et al. (2015a; 2015b).
The San Jerónimo Vegetable Garden (SJVG) project, headed by the confederation “Ecologistas en Acción” (EA)1, is an example of an urban ecosystem located in Seville, Spain. The SJVG is maintained by its own users, under the supervision and coordination of EA. The harvest is entirely ecological, the production is only for self-consumption, but people can exchange products and services. Then, the SJVG's social organization is characterized for allowing and promoting a lot of interactions and social exchanges between the participants. Nevertheless, the behaviors, interactions and communications are regulated by norms established by the community in assembly, under the supervision of the EA.
The SJVG-MAS Project2, whose initial results were presented in Farias et al. (2013), Rodrigues et al. (2013), Santos et al. (2012), Santos et al. (2014a, 2014b) and Silva et al. (2013), addresses, in an interdisciplinary approach, the development of tools based on Multiagent Systems (MAS) for the simulation of the social production and management processes that occur in urban ecosystems, as understood by Dimuro (2010) and Dimuro & Jerez (2010, 2011). The Project is a joint effort for interrelating knowledge, seeking collective interpretations, adopting as case study the current tendency of (re)approaching the countryside to the city through urban vegetable gardens, in particular, the SJVG. We aim to contribute for the analysis of the actual reality of the SJVG experiment, providing resources to foment the discussions on the adopted methodology and to help the investigation of new possible ideas that may be applied in the context of the SJVG's organization, for example, how possible changes in the social organization (e.g., roles assumed by the agents in the organization, actions, behaviors, (in)formal interaction/communication protocols, regulation norms), especially from the point of view of the agent's participation in the decision making processes, may transform this reality, from the social, environmental and economic point of view, then contributing for the sustainability of the project.
The objective of this paper is to present the MAS-based tools developed in the SJVG-MAS context, discussing the adopted solutions and introducing the results obtained in simulations. In order to take into account all the suitable characteristics of the SJVG social organization, we conceived our MAS as a multi-dimensional BDI-like agent social system3, using the JaCaMo framework (Boissier et al. 2013), involving the development of five dimensions:
- The agents’ population: the agents that may assume roles in the SJVG social organization;
- The social organization: the organizational roles of gardener, institution, technician, etc.) and their hierarchy;
- The (physical) environment;
- The interactional/communication structure (among the considered roles);
- The regulatory structure: constitutive and regulative internal norms established by the SJVG community.
We adopted the JaCaMo framework mainly because it offers high-level and modular facilities to develop the first three dimensions mentioned above. It is composed of three separate technologies:
- The Jason interpreter of an extended version of AgentSpeak-L language (Bordini et al. 2007), for the implementation of the agents' population (Dimension (1));
- The CArtAgO framework (Ricci et al. 2011), for modeling the environment (Dimension (3)) using the concept of artifacts (Ricci et al. 2007);
- The MOISE+ model (Hübner et al. 2007,2010), for modeling the social organization (Dimension (2)).
We found that the modularity provided by the JaCaMo framework helps the modeling of real world organizations, especially when an interdisciplinary working group is involved, as in the SJVG-MAS project. Moreover, this modular development facilitated modifications in the organization, which is important for the analysis of the impact of those changes in the social production and management processes and in the environment. See also the discussions in Hübner et al. (2010) and Santos et al. (2014a).
Observe that, as the implementation of the dimension (1), namely, the agent population, was done using Jason, the adopted agent architecture was the BDI (Beliefs, Desires, Intentions) model. Our choice for an agent model of intentional nature, whose behavior can be explained by attributing certain mental attitudes to the agents, such as knowledge, beliefs, desires, intentions, obligations, commitments, is justified by a large amount of work discussing the role of such models in agent-based simulation of human behavior, emotions, and value-based evaluation, such as trust and reputation. See, e.g., the discussions presented by An (An 2012), Filatova et al. (2013), Subagdja et al. (2009) and Adamatti et al. ( 2014).
For the other dimensions (4) and (5), which are particular important, since modifications in the interaction/communication/regulatory structures may directly affect the social processes under analysis in this project, we introduced a communication and a regulatory structures, based on the CArtAgO framework and an adaptation of the MSPP framework (Modeling and Simulation Public Policies, introduced in Santos & Costa (2012), respectively.
Some Additional Comments on Related Work
This paper presented the use of integrated artifacts to model an urban ecosystem, based in a multidimensional multiagent approach. These artifacts act in different dimensions of the social system: organizational, interactional/communication, regulatory and physical aspects. In the literature, we do not find works where artifacts are used in real systems, in such general approach, as in our proposal. Some works presented how JaCaMo infrastructure could be applied, using “toy examples”, as presented by Hübner et al. (2009), or “hypothetical examples”, as introduced in Baldoni et al. (2010), in order to show how artifacts can be used and the advances of such approach. For example, Baldoni et al. (a href="#baldoni2010">2010) presented an application of artifacts that explains how they could be flexible and reusable. Mokom (2015) presented a proposal to insert artifacts in multiagent-based simulations, where theses artifacts are dynamic using Artificial Intelligence techniques, as genetic algorithms and cultural algorithms. In a similar line of work, Von Laer et al. (2015) introduced an evolutionary agent society based on cultural artifacts, used to promote the self-regulation of exchange processes, in the same direction of the works by Dimuro et al (2007,2011), Dimuro & da Rocha Costa (2015) and Pereira et al. (2008).
Related to the modeling and simulation of (urban or not) ecosystems and/or socio-ecological systems using agent-based or multiagent systems, the works found in the literature do not apply artifacts, although agent technology has been adopted in several works for performing simulations (see, e.g., the discussion on the challenges and prospects of agent-based modeling and simulation in the social-ecological systems presented by Filatova et al. (2013).
In fact, the number of agent-based modeling applications within the socio-environmental context has exploded over the last decade, although the majority uses simple agent models (e.g., reactive agents). Differently, we have adopted a very special cognitive agent model, suitable for the kind of social organization found in the studied urban ecosystem.
Nevertheless, in the work by Alberti & Waddell (2000), agents and georeferenced data are used to propose a sustainable ecosystem, trying to explain how the metropolitan areas evolve. Manson (2003) presented a new approach to validate and verify multi-agent systems applied to environmental domains, according to an specific criteria related to ecosystem management, see also Janssen (2003), for several works discussing complexity and ecosystem management, based on multiagent approaches). In Adamatti et al. (2005, 2009) and Koutiva & Makropoulos (2012), the multiagent approach is used to model a urban water management. Chen et al. (2012) used multiagent systems for modeling the effects of social norms on enrollment in payments for ecosystem services. Rai & Robinson (2015) discussed the empirical integration of social, behavioral, economic, and environmental factors in their agent-based modeling of energy technology adoption. Sun & Müller (2013) proposed a framework for modeling payments for ecosystem services with agent-based models.
One interesting work is by Sahrbacher et al. (2014), who presented agent-based tools for the modeling and simulation spatial relationships between ecosystem services and agricultural production, for the analysis of agricultural structural changes, due to the collective impacts of farmers’ land management decisions on above ground ecosystem services and their implications for agriculture. Iwamura et al. (2014) used agent-based modeling for analysing interactions between social and ecological systems in the context on indigenous lands.
In a more general approach, Magliocca et al. (2014) introduced the agent-based virtual laboratory (ABVL) approach, which requires more generalized agent-based models (ABMs) for cross-site experimentation, comparison, and synthesis. Broadly, the ABVL approach harnesses the process-based explanatory power of ABMs within a modeling system architecture explicitly designed for flexible, iterative experimentation and cross-site comparison. However, ABVL is still limited for using simple reactive agents, so it is not possible to evaluate in which extension it can take into account the modeling of complex interactions and behaviours.
The rest of the paper is organized as follows. In Section 2, the JaCaMo framework and its related tools are briefly explained. The MSPP framework is presented in Section 4. Section 5 presents the model of the SJVG 5-dimension Social Organization, discussing the adopted solutions and the integration of the several kinds of artifacts. Section 6 presents some examples of simulations. Section 7 is the Conclusions. Some auxiliary information about the periodic routines of the several roles identified in the SJVG Social Organization is presented in Appendix A. Appendix B presents auxiliary examples of the integration of artifacts in the daily routines of some roles, in form of activity diagrams. The source code of this work is available as a supplementary material of this paper.
The JaCaMo framework
In this section, we explain the technologies that are encompassed by JaCaMo framework (Boissier et al. 2013), namely: Jason, CArtAgo and MOISE+, presenting the main features of these technologies, which cover some of the levels of abstractions that are required for the development of sophisticated MAS, which, in our case, are the agents' population, the environment and the social organization.
Jason and the agents' population
For the implementation of the agents' population, JaCaMo provides Jason (Bordini et al. 2007), which is an AgentSpeak-L interpreter that provides a platform to develop MAS, based on BDI agent model. Observe that there are many BDI ad hoc implementations systems, however, an important characteristic of the AgentSpeak-L language is its theoretic base. The AgentSpeak-L programming language is an elegant extension of logic programming to BDI architecture for agents. An AgentSpeak-L agent corresponds to the specification of a set of beliefs and plans that forms the initial knowledge base4.
AgentSpeak-L distinguishes two types of goals: achievement goals and test goals. Achievement and test goals are predicates, such as beliefs, but they have fixed operators ‘!’ and ‘?’, respectively. Achievement goals express what the agent wants to achieve in an environment state, where the predicate associated with the goal is true. In fact, these objectives start the execution of subplans. A test goal returns the unification of a predicate test with an agent belief, or failure if the unification is not possible with the agent beliefs.
A triggering event defines which events may initiate the execution of a plan. An event can be internal, when generated by the execution of a plan if a subgoal needs to be achieved, or external, when generated by the perception of the environment. Activating events are related to the addition and removal of mental attitudes (beliefs or goals). Add and remove mental attitudes are represented by fixed operators (‘+’) and (‘-‘).
The CArtAgo framework and the MAS environment
For the MAS environment implementation (and also other facilities, which are discussed in the following sections), JaCaMo provides the CArtAgO (Common Artifact infrastructure for Agents Open environments) framework (Hübner et al. 2010; Ricci et al. 2011), which is a MAS virtual environment development and simulation framework. CArtAgO allows the implementation of a virtual environment as a computational layer encapsulating the facilities and non-autonomous services exploited by agents during runtime5.
CArtAgO is based on the Agents and Artifacts (A & A) (Ricci et al. 2007) meta-model to model MAS. This model introduces a high-level metaphor, based in the idea that human workers act in a cooperative way with their environment: agents are computational entities that do some type of goal-oriented task (analogous to human workers), and artifacts are the resources and tools dynamically created, handled and shared by agents to support their activities, both individual and collective (as in the human context). So, it is possible to develop artifacts that are instantiated in the environment, providing services to agents, and able to do communication with external services (e.g., web-services).
Moise+ and the MAS social organization
For modeling the MAS organization, JaCaMo offers the MOISE+ organizational model (Hübner et al. 2007), which encompasses the specification of three dimensions: the structural, where roles, inheritance links and groups are defined; the functional, where a set of global plans are defined, with missions to achieve those goals; and the normative dimension that specifies which role has to commit to which mission.
In a Structural Specification (SS), individual, social and collective levels can be defined based on three concepts: roles (individual level - set of behavioral constraints that an agent accepts when joining a group), relationships between roles (social level - relations allowed between the roles) and groups (collective level - a set of agents with similar affinities and objectives). The SS is defined by a tuple where RG is the set of specification of roots groups of SS,RSS is the set of all roles in the SSand C is the inheritance relationship on roles of RSS.
The Functional Specification (FE) is composed by a collection of Social Schemes (SE), which are sets of goals structured by plans. The Global Targets represent the state of the world that is desired by the organization, different from a local goal since the latter is of a single agent. The set of all SE is denoted by SCHand a scheme schis defined by the tuple where:
- G is the set of goals in the scheme,
- P is the set of plans that builds the goals decomposition tree,
- M is the set of missions, that is, a set of global goals that can be bound to a role,
- mo: M→P is a function that determines the set of goals in each mission,
- nm:M→NxN determines the maximum and minimum number N of agents that must commit to each mission.
The Normative Specification (NS) is where role missions are specified with permission or obligation type. This specification defines a permission (per) or an obligation (obl) related to a mission (m) that an agent with a role in the organization is committed with (see Figure 1). They are defined as the tuples per(p, m, tc) and obl(p, m, tc) where p determines that an agent with the role p can be committed with the mission m , tc determines that temporal constraints are established, that is, there is a period where the permission is valid, for example, “every day” or “every hour”.
The MSPP Framework for Modeling Public Policies
The MSPP (Modeling and Simulation of Public Policies) framework (Santos & Costa 2012) aims to support agent-based models for the various types of sequential and non-sequential models of public policy processes, as classified in Hill (2009). It consists of a set of programming schemes, classes and an API developed for the Jason-Cartago platform. Its purpose is to help the development of agent-based simulations of public policy processes operating on agent-based simulations of social, economic and environmental contexts.
In general, a policy is conceived as a set of principles that orient and/or condition decisions and actions of the agents that operate in a given context, especially in what concerns the uses of the available resources Easton (1965). A public policy in a given society, thus, is a policy concerning the uses of resources that are considered to be public in that society, usually being issued by the government of that society, as discussed in (Hill 2009). In the context of MSPP framework, a public policy is a set of norms and action plans, to be adopted and followed by both the government agents and the societal agents that operate in the social context of concern.
The MSPP toolkit contains the following set of agent types:
- Government: an agent able to issue public policies (for simplicity, the government of the society can be modeled as a single agent);
- Societal or social agents: those agents to which the public policy is generally addressed, presumably to solve a public issued identified in their social context;
- Government agents: agents that operate as detectors and effectors for the government, as
- Norm enforcers: detector and effector agents that participate in the process of enforcement of the norms specified by the public policy;
- Norm detectors, which capture information concerning the agents' compliances to the policy norms;
- Norm effectors, which apply the sanctions prescribed by the norms to the agents that do not comply to them;
- Environmental operators: agents that perform plans specified by the public policy, aiming at the direct control of aspects of the physical or social environment of the society, in the sense of performing actions that operationally interfere with the structure and/or the elements of those environments (e.g.: actions on physical objects, interferences on social relationships, damage of the natural environment, etc.);
- Environmental detectors, which capture information concerning the state of the environment resources;
- Environmental effectors, which act on the environment resources, changing their features, allowing or blocking the other agents’ accesses to them, creating or removing resources, etc.
The essential concept in the MSPP framework is that of policy artifacts, that is, CArtAgO artifacts that reify the public policies that are addressed to the government agents and societal agents of the society, so that the components of public policies are concretely represented as artifacts in the environment. The reification of public policies as policy artifacts amounts to the reification of norms and plans, so that norm artifacts and plan artifacts should be defined and instantiated in the CArtAgO framework, together with AgentSpeak-L program schemes that allow the agents of the society to handle them adequately.
Modeling the SJVG Social Organization in JaCaMo
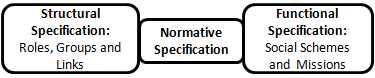
The urban vegetable garden of the San Jerónimo Park (SJVG) (Seville/Spain) (Figure 2) is an initiative of the confederation EA in order to promote social participation in organic farming practices through the use of urban vegetable gardens to recreation, and conducting activities related to environmental education. The main features of this project is that this urban ecosystem is centered on a nonprofit, social urban vegetable garden (that is, the production is dedicated to its own participants), the production is all based on natural and ecological principles, promoting the integration between human and natural resources.
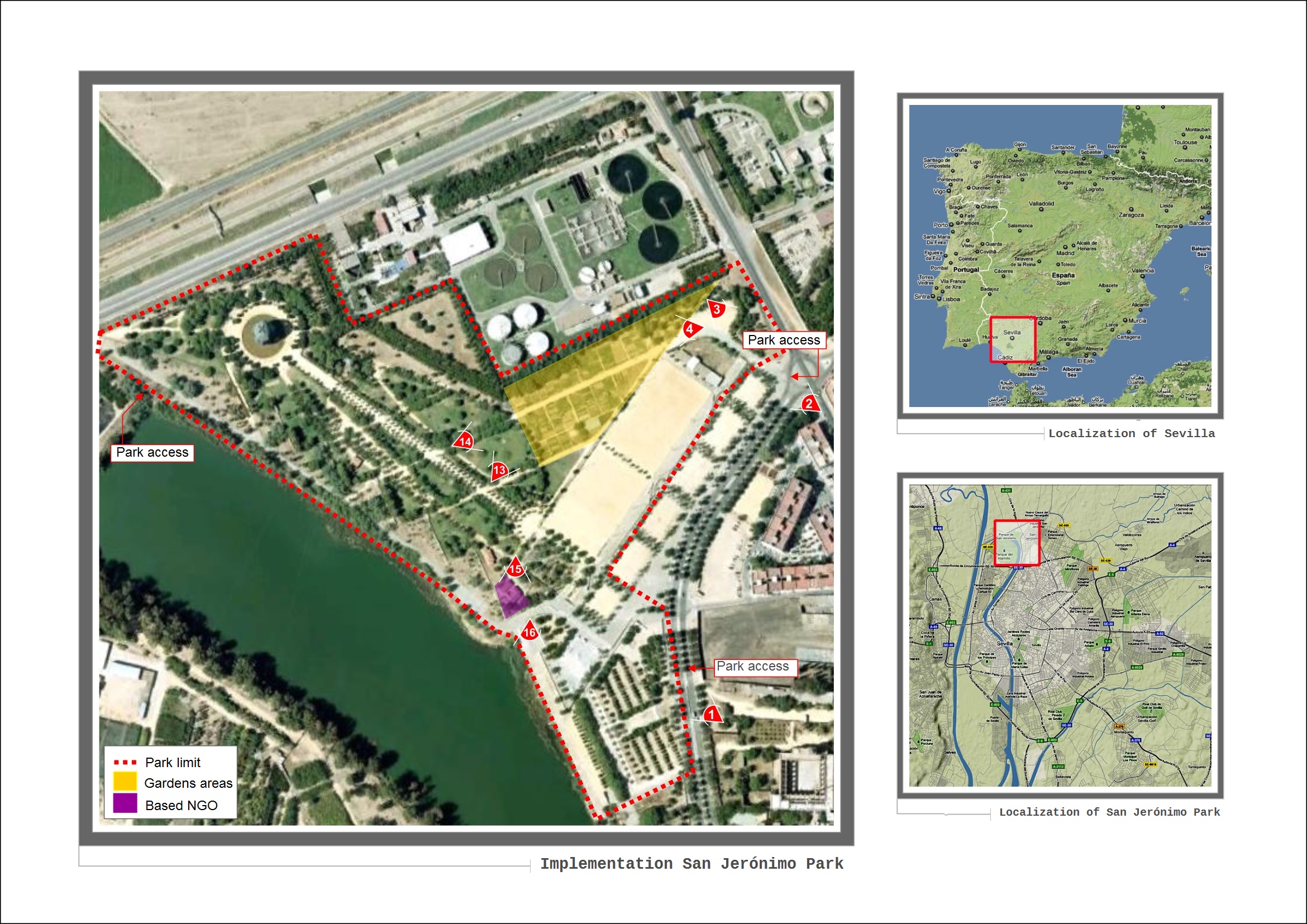
The vegetable gardens are located in the San Jerónimo Park, occupying about 1.5 hectares, divided into 42 individual plots (of size around 75 m²), assigned to gardeners of different ages, especially retirees. Although the “ownership” of each plot is individual, the work in the garden is sometimes shared among other family members or even friends, called the auxiliary gardeners. A person who intend to enter in the project is called an aspiring gardener. The EA confederation has a collective plot, allocated to its partners, and another plot that serves as a kind of “School Plot”, where classes on organic crops are eventually taught. Figure 3 shows the schema of a SJVG plot.
The role of EA confederation is to oversee the work of the gardeners, providing technical support, controlling the use of chemical pesticides, which is strictly forbidden, promoting orientation and motivational talks, and also recreation activities. The gardeners, in turn, to ensure their permanence in the project, must comply with a set of determinations established in the SJVG's Internal Regulation Norms, including, e.g., the requirement for organic farming and the forbiddance of selling or trading the products, but also other rules such as to keep the portion clean, to take care of the common areas, to attend the assemblies, to irrigate by dripping water, to collaborate with the operation of the facilities and infrastructures, to pay a monthly fee, among others.
A key feature of the project is the horizontality time to make decisions that are always taken in the SJVG Assemblies and established in the form of consensus among the community of gardeners and technicians of the EA confederation. Besides the cultivation of individual plots, the SJVG project includes the care of a greenhouse for growing seedlings and a chicken coop. EA also performs some agreements with Sevilla University and/or other academic institutions and supports students in internships. Finally, depending on the annual budget, EA also carries out work with neighborhood schools through school vegetable gardens.
In this section we present the solution we introduce for modeling, in JaCaMO, the five dimensions identified in the SJVG Social Organization, namely (i) the agents’ population, (ii) the social organization, (iii) the environment, (iv) the interactional/communication structure, and (v) the regulatory structure. This was done by the integration of Organizational, Regulatory, Communication and Physical Artifacts, as initially proposed by Santos et al. (2014a).
The Organizational Modeling and the Organizational Artifact
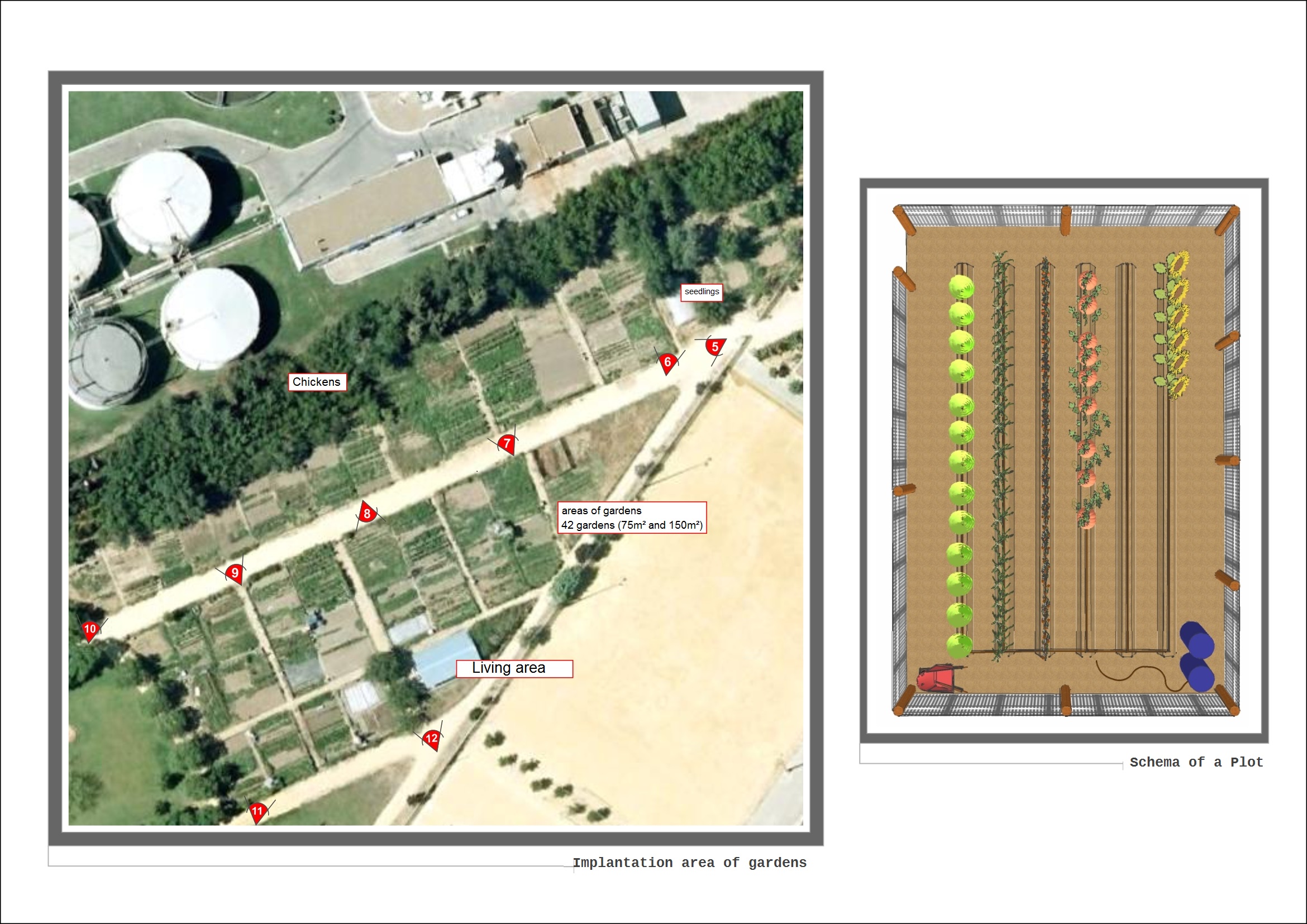
The social organization was firstly modeled using MOISE+. Figure 4 shows the structural model for the SJVG, where roles, groups and sub-groups, role relationships are specified. In this Structural Specification (SS), we specified the root group “HSJ_Vegetable_Garden(SJVG project)” and its sub-groups EA confederation and Parcel (plot for cultivation). The roles that can be assumed in these sub-groups are: gardener and auxiliary gardener, aspiring gardener, administration, secretary and EA technician. The relationships between these roles can be: authority (which is the case of the EA administration in relation to the secretary, technician and gardener), communications and compatibility (between auxiliary gardener and aspiring gardener). According to MOISE+ model, agents in different groups cannot assume different roles in different groups. In our model (Figure 4), just the auxiliary gardener and aspiring gardener can assume the two roles simultaneously.
The organizational elements are modeled as artifacts, using ORA4MAS, which is an artifact-based infrastructure (based in CArtAgO), where first-class entities of the system are also modeled. We consider the two default CArtAgO artifacts, GroupBoard and SchemeBoard, both belonging to the ora4mas.nopl package of CArtAgO framework.
Physical Artifacts and the Environment
The environment is a computational or physical space in which agents are situated, and the notions of perceptions, actions and interactions are defined and developed, and so, the agent can perceive and act (Ricci et al. 2011).
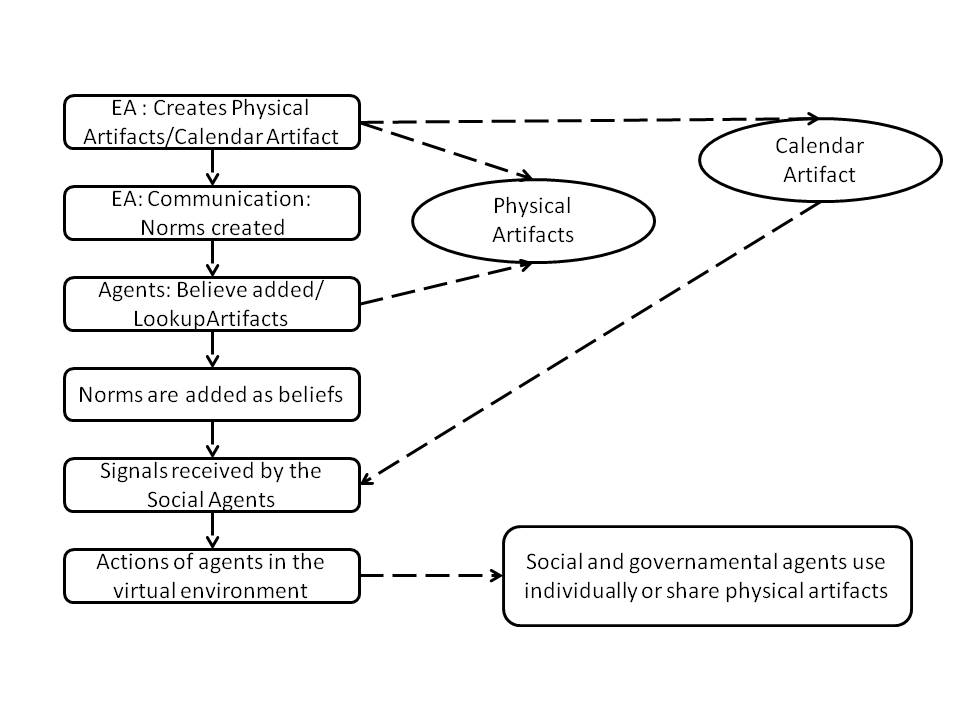
Physical Artifacts for the SJVG were developed using the CArtAgO framework. They are abstractions about the environment, representing resources or tools that agents can instantiate dynamically, share and use as support in their daily activities in SJVG, and these activities can be individual or in-group. These artifacts in the SJVG environment represent, for example, grubber, shovel, rake, plot, watering can, planter, seeds, closet, clock, all them implemented in CArtAgO. In Figure 5, we present the sequence of agent actions, in order to use physical artifacts. Whenever the artifact is created by EA, the agents receive a message (which is transformed into a belief) and then they use the “lookupartifact” operation (action provided by CArtAgO) and seek the physical artifact.
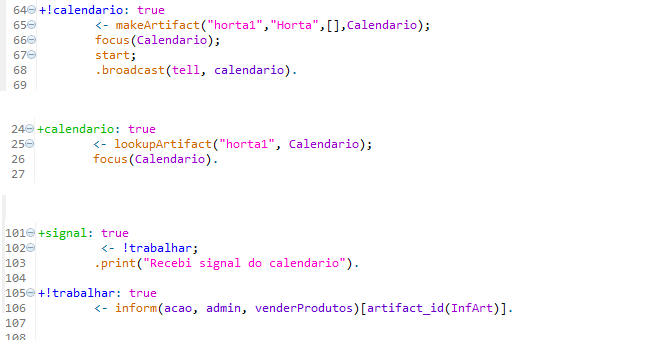
Agents also receive signals from the “calendar” artifact to execute the available actions in the virtual environment. Figure 6 shows the Jason code to create the artifact by the EA agent using the “makeArtifact” operation, searching the agent that will use this artifact by the “lookupartifact” operation and, finally, the agent receiving the signal by the calendar artifact.
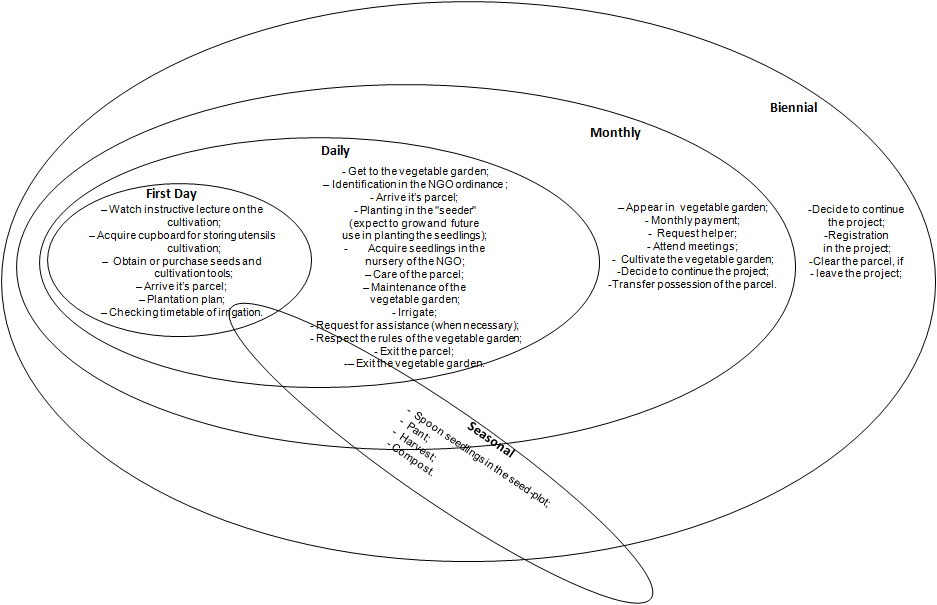
Some Problems with JaCaMo
The social organization of SJVG is based on the performance of periodic routines by the organizational roles, and also on periodic norms that regulate their behaviors. An example can be seen in the periodic routines of an agent playing the role of a Gardener shown in Figure 7 in the form of Venn Diagram, where one can observe that a “Gardener, to join the SJVG project, has the obligation to pay a fee monthly”. For more details on the modelling of other periodic routines of different roles in the SJVG social organization, see the Appendix.
However, in the JaCaMo framework, as discussed in Santos et al. (2014b), the modeling of such role routines cannot be easily done, since there are no native tools in the platform that allow this kind of specification. In the actual development of JaCaMo infrastructure, the allowed processes in the MAS organization, in terms of the goals that must be achieved, have to be described through the MOISE+ model. This tool presents a good abstraction level to specify these objectives, as well as the definition of a hierarchy between them. However, a periodic routine involves the achievement of periodic goals (e.g., in periods of one month, one week, one day), and MOISE+ model does not have structures to do represent such periodicity.
Moreover, in social systems, there are situations in which norms must be applied, imposing sanctions over not allowed actions when the agents perform them. In SJVG, many behaviors subject to sanctions were identified, as the “to sell garden's harvest”, “to irrigate with hoses” and “to use of chemicals in the garden”, which are not allowed according to the SJVG's Internal Regulation Norms.
Finally, another problem that we face in JaCaMo is that it does not have a native and modular way of defining the allowed interactions among agents, neither in the agent population nor in the organization dimension6.
Therefore, considering that there is no way in MOISE+ for defining the periodicity of actions (in the achievement of goals), there is no direct mean to define norms in JaCaMO, their basic attributes (name, periodicity, applying role) and the sanctions and there is not a modular infrastructure for defining interactions via communication, we present in the following section how we solve these problems, in the context of SJVG project.
Modeling Norms and the Regulatory Artifacts
For modelling the periodic norms, we extended the MSPP framework, adapting it to the case on internal regulation norms.
This tool complements the MOISE+ model presented in the previous section, offering another abstraction layer. In the MSPP framework, the periodic routines can be modeled, as the norms are defined in the framework, while, in the MOISE+ model, the normalized actions are specified, constituting the routines.
For the modeling of regulatory policies of SJVG, four kinds of normative artifacts were developed:
Artifact of prohibition norms: prohibition norms establish the actions that the social agents playing roles in the SJVG organization (e.g., gardeners) are restrained to perform (e.g., “to raise animals” is prohibited).
Artifact of obligation norms: the norms of obligation impose obligations for the agents to perform certain actions, such as "to pay the monthly fee".
Artifact of permission norms: permission norms are those that establish that the agents should check with the government agents (e.g., technicians, secretaries) whenever it is possible or not to perform a certain action, for example, there is a norm that says that “if you want to plant trees with a duty cycle greater than two years then it is necessary to request permission for that”. :
Artifact of right norms: the rules of right are regulations that establish that any social agent has the full power to execute the planned action whenever it does not infringe other norms.
Examples of the specification of the four types of norms are:
- Norm(n08, prohibited, sellProducts, seriousFault, seriousCumulative),
- Norm(n22, obligatory, monthlyPayment, seriousFalt, seriousCumulative),
- Norm(n25, permission, useMachinery, permitted, nothing),
- Norm(n21, right, buildLocker, nothing, nothing).
The SJVG norms are created through plans by the issuing agent EA. When the EA agent executes those plans, the norms are created through the corresponding normative artifact. At the end of this creation, we have the sets of rules of prohibition, obligation, right or permission, and the agent responsible for issuing norms execute a “broadcast” (the Jason action to disseminate message to all agents), so that the other agents begin to look for normative artifacts already containing its set of rules. This is illustrated in (Figure 8).
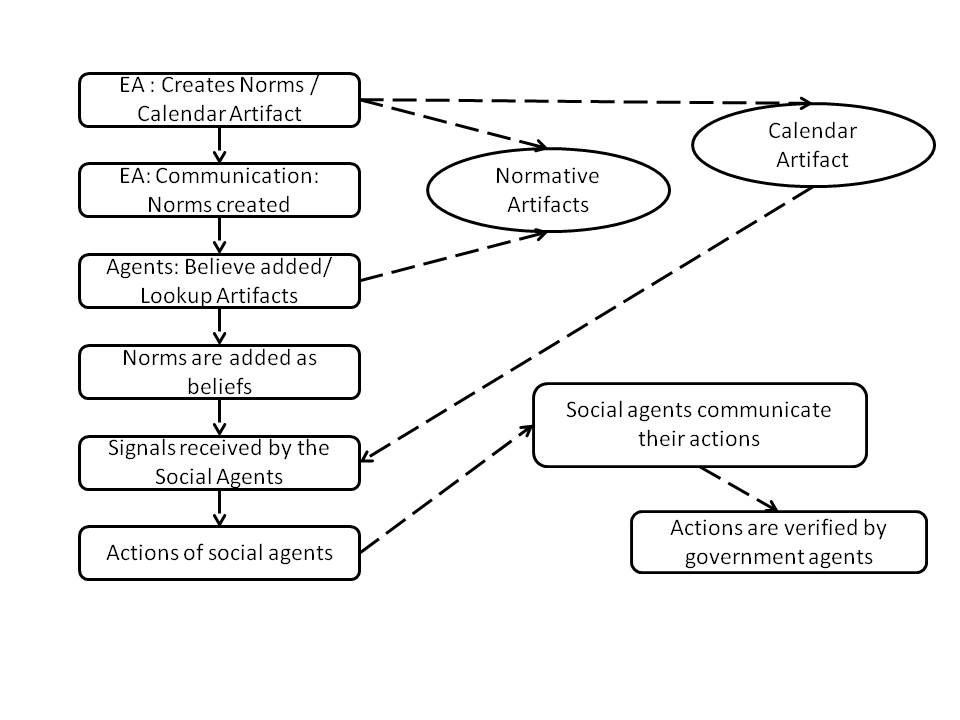
Once agents receive the message sent by the issuing agent EA, this is transformed into a belief, and then the agent, through the operation “lookupartifact” (action provided by CArtAgO), looks for the normative artifact, adds the appropriate beliefs corresponding to each established norm (e.g., “+prohibited(createAnimals)”) and ultimately continues observing this artifact through the operation “focus”, in order to observe whenever there is any change in these rules or exclusion.
The detector and/or effector government agent (agent responsible for monitoring the compliance with the norms) and the social agents have knowledge (in their beliefs) of the norms issued by the EA agent, eventually verifying in the normative artifacts for any provided action or sanction. These agents acquire knowledge of the actions performed by the social agents through communication, that is, the social agents inform the detector and/or effector government agent the action it has performed, and this agent, in its turn, has the mission to verify in the normative artifacts if such action corresponds to a violation or not, according to the SJVG Regulation. Note that actions that are not in the SJVG Regulation are interpreted by the detector and/or effector government agent as legal actions, causing no sanction to the agent who performs them. The detector and/or effector government agent is a centralized agent, i.e., it receives all messages of all social agents. In this way, it is impossible to hide information or to lie to it.
Messages that social agents send to government agents are formally specified as: action (actionRealized, myName) where “action” indicates that this information is related to an action to be checked, “actionRealized” is the action that the agent has performed, and “myName” is the identification of the agent that performed the action, as the following example: .send(detectorAgent, tell, action(cleanGarden, socialAgent)).
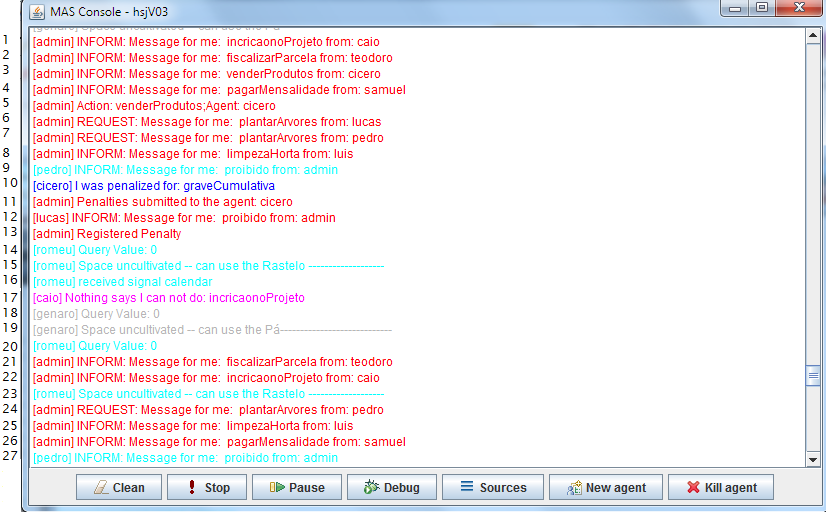
The action “.send” in this example is sent by the “socialAgent”, communicating the detector agent that “it has wiped its growing plot”. This will be analyzed by the detector agent that verifies if the parameter “cleanGarden” indicates a prohibited action, but as it comes be to a regulated action of obligation, it does not cause any sanction. If the action is a violation to any prohibition, as below: .send(detectorAgent, tell, action(sellProducts, socialAgent)). then, the detector agent, when receives the message, perceives that the action is a violation. It looks in its belief base for the related penalties, notifying the violator agent, and applying the sanction by registering it in the artifact of penalty registration. Finally, the detector agent checks in the same penalty registration artifact if the agent is a recidivist violator. If so, and if the violator has more than three serious offenses cumulatively, then this social agent is subjected to the SJVG assembly.
The assembly is convened by the detector/effector agent of the organization. This is to bring together all social agents to give opinions about the permanence or not of the violator agent in the social project. This is done through communication among agents, where the agent that detected the third recurrence of the violation summons the other agents for the meeting, using the action “broadcast” with parameters: (tell, assembly (Agent)), where “assembly” represents the belief and “agent” the name of the violator. Once the voting agents receive this belief, they seek in their bases a specific value7 that was previously calculated, between 0 and 1, so that they can give their vote in favor (value greater than 0.5) or not of excluding the violator agent of the SJVG project. If the majority of voters opt for the violator removal, then the violator agent is expelled from the organization and this is done through the action “.kill_agent” (an action that is available in Jason).
Notice that the agents have the ability to qualify their own actions through the plans already inserted in the MSPP framework, and then they can opt for committing offenses whenever they have other more important goals for the moment. For example, an agent with financial problems can try to solve these problems selling cultivated products, thus committing a fault, according to SJVG Internal Regulation Norms.
The actions that social agents assume can be triggered by different ways, for example, by communication with another agent, or by an established routine, or by a CArtAgO artifact that simulates a calendar with information regarding the time of planting, harvesting and cleaning the vegetable garden.
Social interactions and the Communication Artifacts
The communication is done by artifacts that allow modular specification of the possible interactions in the MAS, encapsulating the messages. Then, it is possible to create new protocols and different ways of communication just creating the respective artifacts. The communication infrastructure offers the following resources, proposed informally in (Rodrigues et al. 2013):
- Communication among agents programmed in both AgentSpeak-L and Java languages;
- Communication among distributed agents and;
- Modular definition of communication protocols and other types of interaction, through their encapsulation within artifacts.
The communication infrastructure is composed by Communication Artifacts, which are divided into two groups:
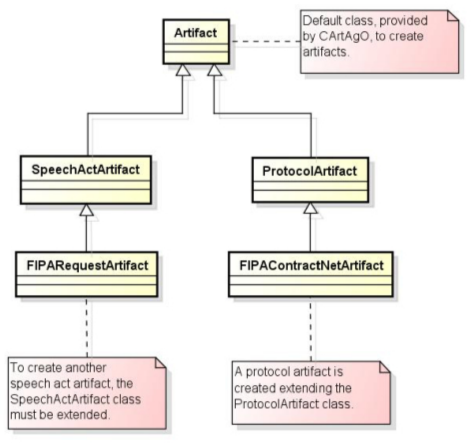
- Protocol artifacts: the protocol artifacts encapsulate the logics of some communication protocol (a kind of communication that is, in general, more complex) and
- Speech act artifacts: the speech act artifacts execute simple speech acts.
Then, the two basic classes of the communication infrastructure are: SpeechAct-Artifact and ProtocolArtifact. The SpeechAct-Artifact class defines the basic behavior of a speech act artifact, used for simpler communications. It manages the ongoing conversations that use artifacts of this type, recording the participants of the conversation as well as storing the message queues of each one. The ProtocolArtifact class defines the basic behavior of a protocol artifact, which offers more complex communications. This class concentrates the details involved in a protocol-based conversation, such as the respective automata (used to control the protocol) and conversation state for each agent involved (Rodrigues et al. 2013). We remark that the speech act artifacts are used simply to send messages, while the protocol artifacts are used to define an authorized sequence of messages to send (that is, defining the protocol’s execution flow). On the other hand, in the speech act artifacts, just the communication performatives are defined. Whenever other types of communication are used (for example, when message exchanges are not used), the communication infrastructure still allows such scenario (for example, when considering implicit communication using the environment). Figure 9 presents the diagram to create these new communication artifacts. Communication is achieved by executing operations available in the communication artifacts. Since they operate as communication mediators, their function is to route any message to its respective receivers and to supervise the order in which they are sent, whenever protocols are used.
The integration of the Artifacts
The JaCaMo framework integrates three agent-based platforms (Jason, CArtAgO and MOISE+) through a semantic relation among concepts of the different programming dimensions (respectively, the agent population, the environment and the organization), all of them joined through a meta-model (CArtAgO), in order to obtain an uniform and consistent programming model and to simplify the combination of these dimensions for programming MAS (Boissier et al. 2013). In this work, we have also to integrate the Regulatory and Communication dimensions.
The integration of the artifacts of SJVG model with the others components of the JaCaMo framework is shown in Figure 10. We use the two default CArtAgO artifacts, GroupBoard and SchemeBoard, mentioned in Section 4.1. The artifact GroupBoard allows an agent to adopt an organizational role (“adoptRole” operation) or leave an organizational role (“leaveRole” operation), as well as to add/remove a scheme (“addScheme/removeScheme”). Their observable properties allow to know the current state of the groups defined in the organization (if they are well formed or not) and the roles adopted by each agent. The artifact SchemeBoard allows agents to commit missions and to change the state of goals (after finished them). Likewise, it is possible to know which agent is committed to each mission and the state of each goal, through its observable properties.
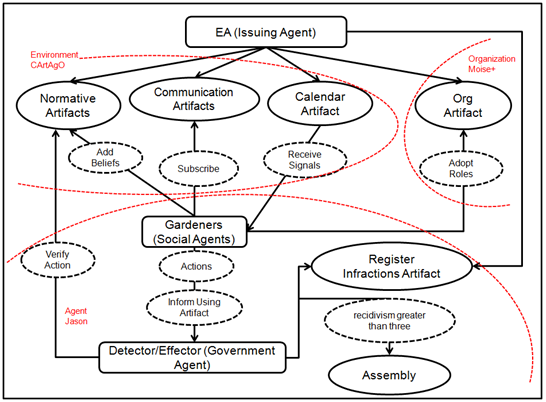
In the SJVG model, the organization consists in a virtual environment and the implementation consists of three types of agents, as shown in Figure 10. The Issuing Policy Agent “EA” is responsible to create the artifacts that are used in the integration between “Gardener” agents. The Issuing Policy Agent “EA” is responsible for issuing the norms, that is, for creating the normative artifacts with a set of rules that will be used in the agents' interactions with roles in the organization. The Governmental agents (“admin”, “technician” and “secretary”) are responsible for detecting the compliance with the issued norms, checking whether there are violations, searching its belief base for penalties, notifying the violator agent by message (“Inform” communication artifact ) and, finally, applying the possible sanction actions that characterize the breaches of the rules (registering it in the agent “Penalty” artifact). In addition, these agents regulate the available resources in the environment.
Social agents (“gardener”, “auxiliary gardener” and “aspiring gardener”) are present in the environment and use artifacts to achieve their goals and accomplish their tasks (routines). These agents are submitted to the norms and try to achieve goals in the organization according to the rules and routines inherent in their role.
Examples and Simulations
In this section, we present some examples8, in order to illustrate the organization model, to explain the use of integrated artifacts and also to discuss some simulations. We point out our objective in not to find output metrics generated by the simulation model. The idea is to test all artifacts in an integrated way to better understand their behavior and how this integration can help to model and simulation social domains.
The following example shows the integration of several kinds of artifacts when a simple action of “monthly payment” is executed.
Example 1: using integrated artifacts in agents' routines in SJVG
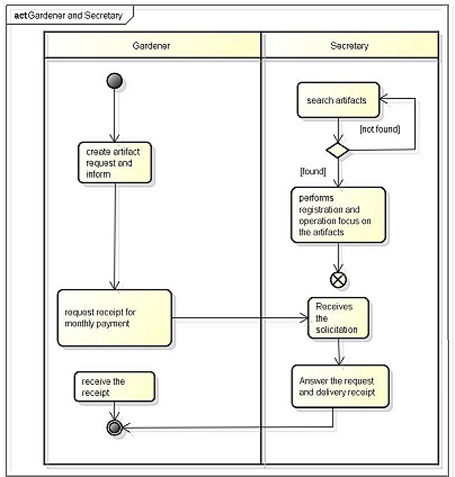
We adopted Activity Diagrams in order to demonstrate the use of artifacts by agents in the virtual environment SJVG, where it is possible to verify the interactions between agents in their routines. Figure 11 presents a simplified diagram, showing the integration of Physical, Normative and Communication Artifacts, where the “gardener” agent has the “obligation” (normative artifact) to make monthly payment at the organization secretary and this action “makes a request” (communication artifact “request”) for one “receipt” (physical artifact). The secretary receives the request and sends the receipt to the gardener (in this moment, an “inform” message is sent). For more details in the routine modelling using diagrams see Appendix B.
In the next example, we show how some agents of the population dimension may adopt roles in the SJVG organization.
Example 2: agents playing roles in the SJVG organization.
In order to implement and verify our simulations, we have used agents that take some actions in the virtual environment, to explore the artifacts functionalities. To have a better understanding, we describe the group of agents and their roles in the organization, as defined in MOISE+ and implemented in Jason:
The HSJ Group: composed by a social agent playing the role of an aspiring gardener, called “CAIO”, which commits no offenses, since it still does not belong to the SJVG project.
Plot Subgroup: composed by social agents playing the roles of “gardener” and “assistant gardener”, called “CICERO, GENARO, LUIS, PEDRO, ROMEO, SAMUEL and LUCAS”, which are agents that may or may not commit infractions, related to “no punishment”, “severe punishment” or “severe and cumulative punishment”.
EA Subgroup: composed by the Governmental Agent and the Issuer agent, playing the role of “ADMIN”, “EA”, “technician” and “secretary”, named “ADMIN, EA, AMALIA and TEODORO”, respectively. Those agents create the norms, oversee compliance with the rules, check penalties, record the penalties in the calendar artifact and apply punishments.
In the modeling of the MOISE+ organization, groups and roles got their defined respective cardinalities, making the integration of the organization in a correct formation if the minimum cardinality is respected.
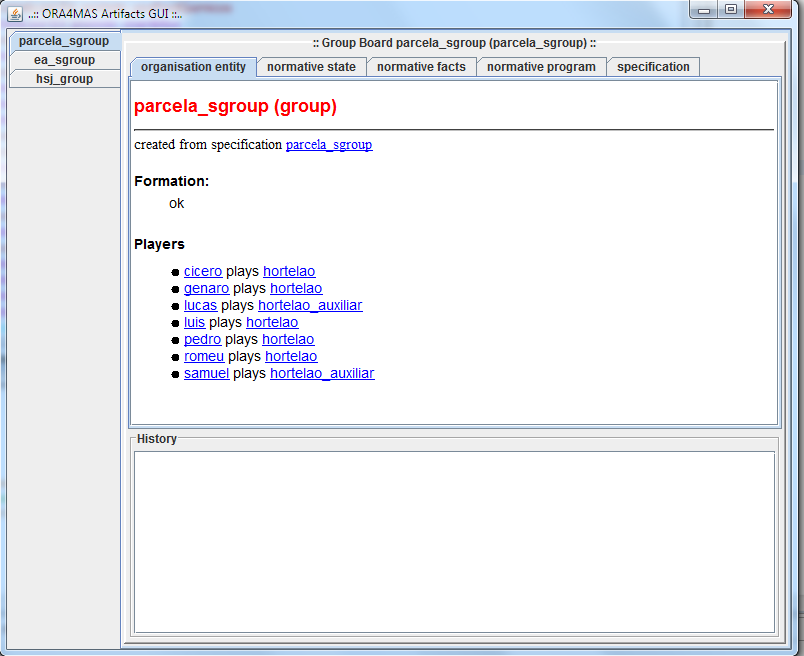
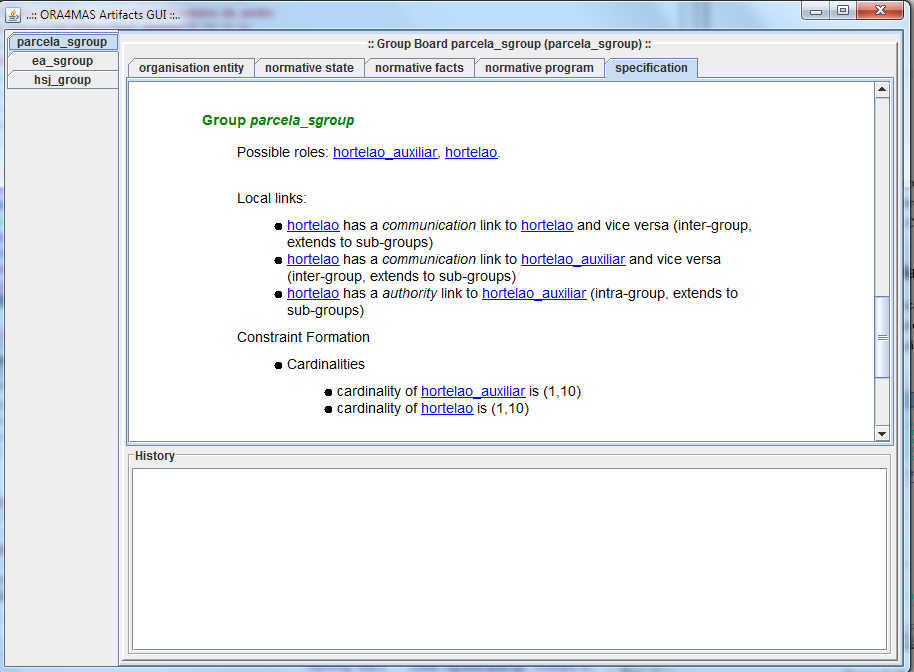
Figure 12 shows the Plot Subgroup, where the formation is according to the MOISE+ definition, which specified that this subgroup has two types of roles, namely, “gardener” and “auxiliary gardener”. Figure 13 shows an example of the cardinality of the “gardener” role, which has the cardinality (1, 10), indicating that there may be at least one and at maximum ten agents playing the role of a “gardener”.
In the following, we present a simple example of a functioning simulation of the SJVG project, showing a case of the violation of a certain norm.
Example 3: a functioning simulation
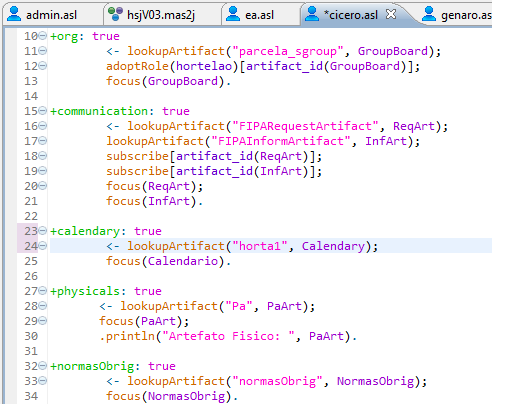
According to the previous example, and since all dimensions were integrated through JaCaMo framework, it is allowed to an agent to assume a role in a specific group. For that, an agent uses the “adoptRole” operation. In Figure 14, the specific “Gardener” agent called “CICERO” (see Example 5.2), through the operation “lookupArtifact”, search the artifact GroupBoard and then it adopts the role of “gardener” in the Plot Subgroup in SJVG (lines 12 and 13).
Observe that, in lines 15, 23, 27 and 32, the “social agents” add beliefs in their belief bases, as the confirmation of the creation of artifacts (“makeArtifact” operation), which is sent by the “EA” agent, through a “.broadcast” command.
After, the agents keep seeking communication artifacts (line 16 and 17), the artifact calendar (which sends signals to agents about available actions in the virtual environment) (line 24), physical artifacts (line 28) and normative artifacts (line 33) by the “lookupArtifact” operation, which is performed for searching for an artifact by its name and identifier (with “lookupArtifact (ArtName, IdArt)”). Finally, they can execute their actions with these resources in the SJVG virtual environment.
During this execution, the operation focus (lines 13, 20, 21, 25, 29 and 34) is performed by the agents, so that they continue observing changes which may occur in those artifacts or even the exclusion of any of them in the environment.
An important concept of the organization is the established rules set by the Confederation EA, in order to help agents to comply with the rules of the SJVG project. The following example shows some Normative Artifacts (obligation, permission, prohibition and right) that were developed in order to simulate the SJVG's regulation norms.
Example 4: normative artifacts
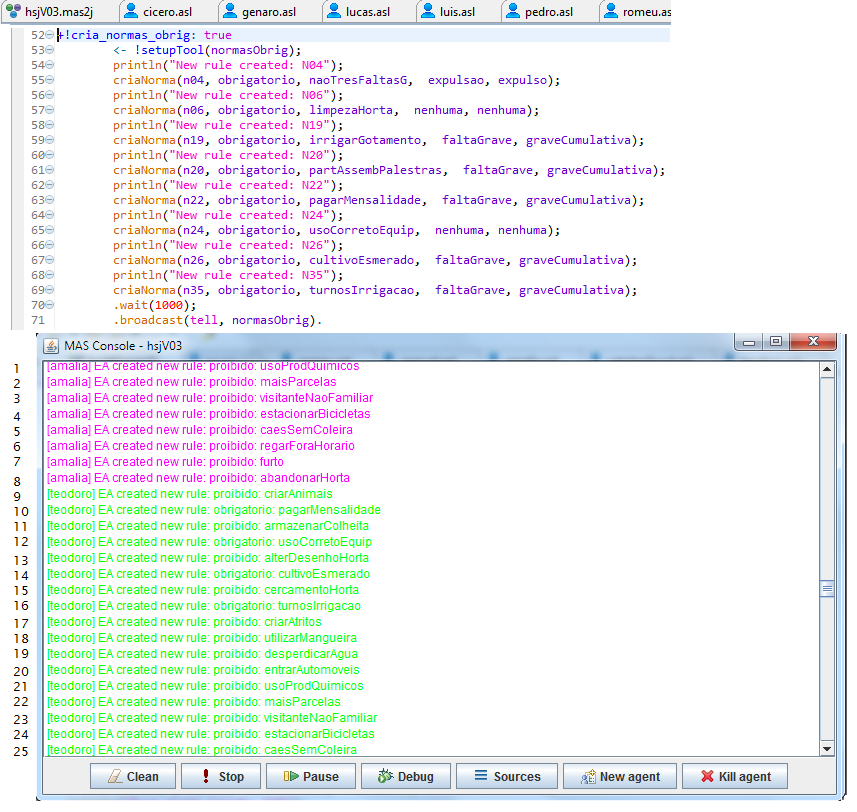
The norms are created through plans by the agent “EA” at the beginning of the simulation. Figure 15 shows the implementation of these plans by the agent, the actions contained in them and the creation of the norms through the normative artifacts. At the bottom of Figure 15, we present a sample simulation.
In Figure 15 (line 63 of the implementation, in the top of the figure, and line 4 of the simulation, in the bottom of the figure), the norm “pagar mensalidade” (which means: “to pay the monthly fee”) is mandatory and the non-compliance constitutes a severe and cumulative misconduct (subject to a punishment). This action is verified by the effector/detector agent (government agent “Admin”), which is responsible for monitoring the compliance with the norms and check the normative artifacts to analyze if the performed action is in fact a violation.
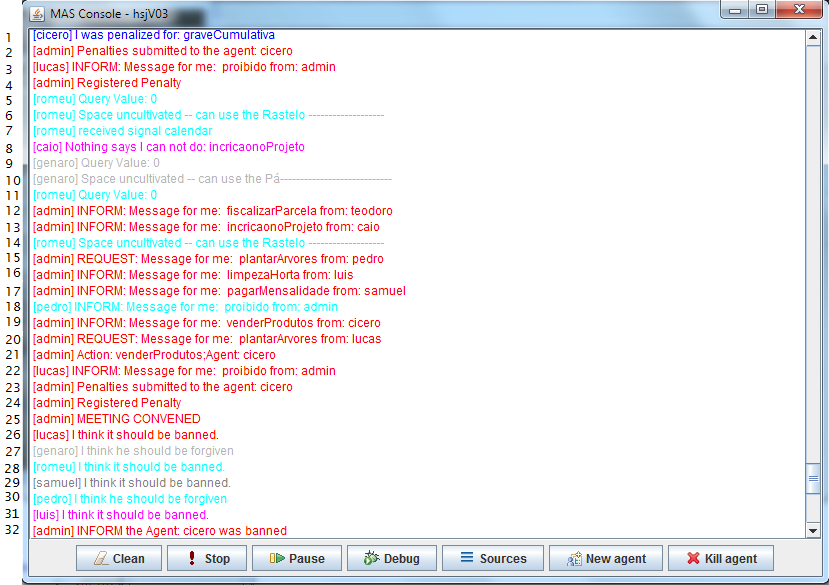
After this verification, as shown in Figure 16, the agent “admin” search in its belief base, for the adequate penalty and notify the offender their offense (lines 3 and 4), registering it in the artifact “Penalty Registration (RP)” (line 23), in order to have the sanction applied to the agent who performed the prohibited action. By checking the number of cumulative penalties recorded in the RP artifact, the government agent “Admin” may convene a meeting (assembly) of the agents participating in SJVG project (Figure 16, line 25), so they can vote with respect to the expulsion (or permanency) of the offending agent from the project. In the simulated example of Figure 16, the agent “Cicero” received 5 votes, which, in this case, is sufficient to have it expelled from SJVG project (line 31). Observe that if it was the case of tie, the decision is done by the governmental agent.
Communication Artifacts must fulfill a function of mediating communication, that is, they forward messages to their recipients, according to protocols, overseeing the execution order of sending these messages. In the following, we present an example of the use of communication artifacts in the SJVG project.
Example 5: communication artifacts
Figure 17 shows an agent called “LUCAS”, playing the role of an auxiliary gardener, asking permission (through a request message to the government agent “admin”) for cultivating trees in the garden (line 6). The agent “admin”, in reply (using a message of type inform), informs that this action is not allowed (line 9). Another possible communication is the agent “CAIO” (line 1) that sends an inform message to agent “admin” about its inscription in the project, which does not require a response from the recipient.
Conclusion
This paper presented some MAS-based tools developed in the SJVG-MAS context, discussing the adopted solutions and introducing some examples of simulations.
We found that to be able to consider all the suitable characteristics of the SJVG social organization (e.g., the periodicity of routines and norms, the interactional character of the social relationships and service exchanges), we had to conceive our MAS as a multi-dimensional BDI-like agent social system, composed of five dimensions: (i) the agents’ population, (ii) the social organization, (iii) the environment, (iv) the interactional/communication structure, and (v) the regulatory structure. So, we adopted the JaCaMo framework, defining and developing other artifact-based infrastructures to deal with the periodicity modeling, communication features and the regulatory policy.
The tools discussed in this paper are to be used, in an interdisciplinary approach, for the simulation of the social production and management processes that occur in urban ecosystems, in particular, the SJVG, contributing for the analysis of the actual reality of the SJVG experiment. According to the discussions on the adopted methodology, the investigation of new possible ideas that may be applied in the context of the SJVG's organization became possible.
Future work is concerned with the development of a simulation interface, so to facilitate the study/analysis of the possible changes in the social organization (e.g., roles assumed by the agents in the organization, actions, behaviors, (in)formal interaction/communication protocols, regulation norms) that may interferer the social production and management processes.
Acknowledgements
This work was partially supported by the Brazilian funding agency CNPq (Conselho Nacional de Desenvolvimento Científico e Tecnológico), under the Proc. No. 481283/2013-7, 306970/2013-9 and 232827/2014-1.Notes
- http://www.ecologistasenaccion.org/.
- SJVG-MAS Project: a mas for the simulation of the social production and management processes in urban ecosystems, the case of the San Jerónimo Urban Vegetable Garden of Seville” (FURG, Brazil; Universidad of Sevilla, Spain) has been developed under the context of the social simulation net of Rio Grande do Sul state, Brazil (UFRGS, FURG, UFPEL, UFSM,UNISINOS).
- The BDI (beliefs, desires, intentions) agent architecture is a particular cognitive agent model introduced in Rao & George (1991).
- Jason is implemented in Java (multi-platform) and it is available as open source under the GNU LGPL license.
- CArtAgo is a Java-based, open source technology, including an API based on the Java language for programming artifacts and runtime environment.
- Zatelli & Hübner (2014) discussed about the interaction component in the context of JaCaMo, however, in a dfferent approach.
- In fact, this value depends on the fuzzy evaluation (Dimuro 2011; Tsai & Lu 2006; Zadeh 2008) by means of pre-aggregation (Lucca et al. 2015) functions of some available information, e.g., cultural aspects (Reynolds & Zanoni 1992; Von Laer et al. 2015), the existent relationships with the violator agent, its antiquity in the project, its reputation (Huynh et al. 2006; Liu et al. 2013; Yu et al. 2014) and influence. This process is not in the scope of this paper and is let for further work.
- In the figures of this section, some words are written in Portuguese, since they were specified by Brazilian specialists that studied the real SJVG’s regulatory, organizational and physical structures.
Appendix
Appendix A. Periodic Routines of the Roles in the SJVG Social Organization
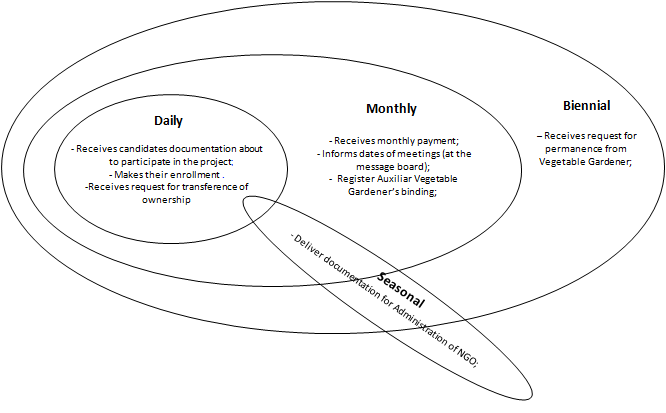
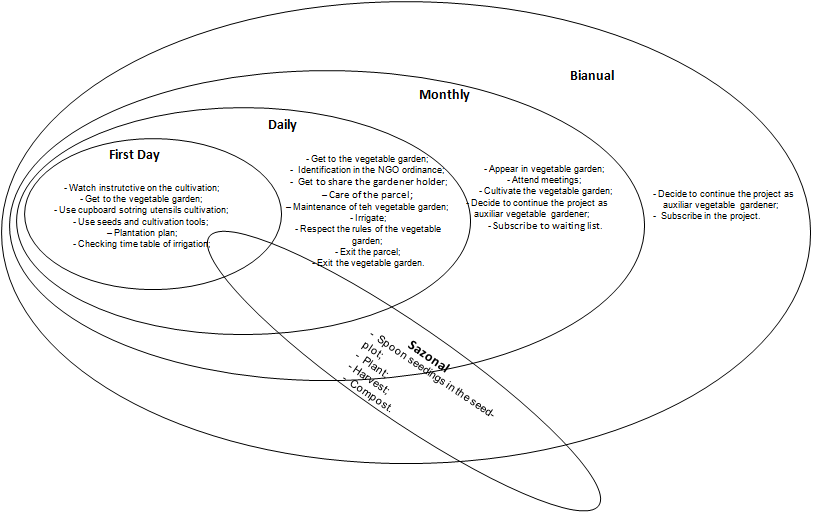
In order to organize and establish the behaviors of the different roles and roles’ routines of SJVG’s organization, as well as the frequency of those routines, we used the so-called ellipses, a kind of Venn diagram of set theory. The use of ellipses helps us to analyze the periodicity of the roles’ routines, helping the understanding of the agents’ behavior, as well as the identification of interactions between them and the environment. As an example, Figure A.18 shows the ellipses of the routines of the EA’s Secretary, described as:
- Daily routines: to receive candidates' documentations desiring to participate in the project, called the Aspiring Vegetable Gardener, registering them in the waiting list; to receive transfer request to plot possession.
- Monthly routines: to receive monthly fees paid by the Vegetable Gardener to cover costs with water (drip), pest control material, use of common tools, etc.; to inform the meetings; to register Auxiliary Vegetable Gardener (informed by Vegetable Gardener).
- Biennial routine: to receive a request from a gardener to continue in the project.
- Seasonal routine: to send the received documentation for the EA Administration.
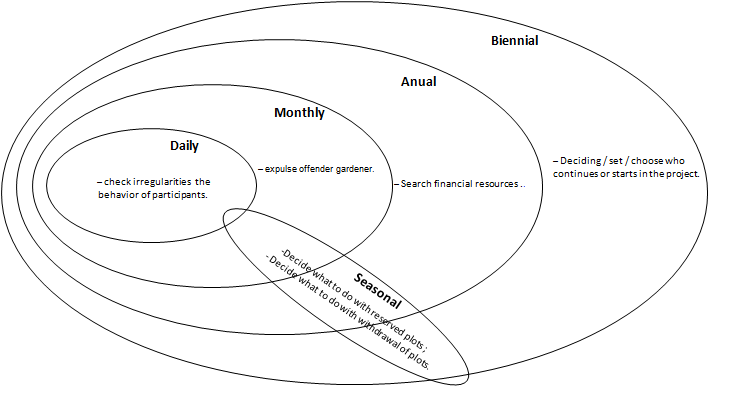
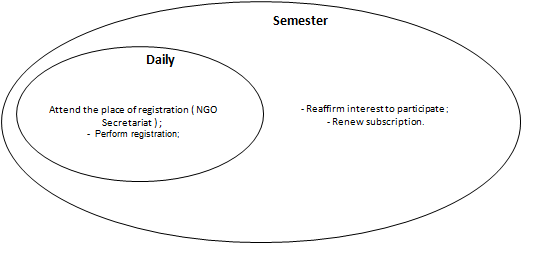
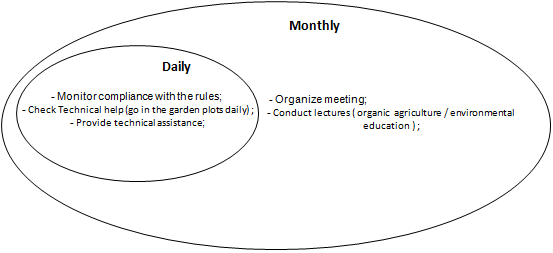
Figures A.19-A.22 shows the periodic routines of the several roles identified in the SJVG Social Organization.
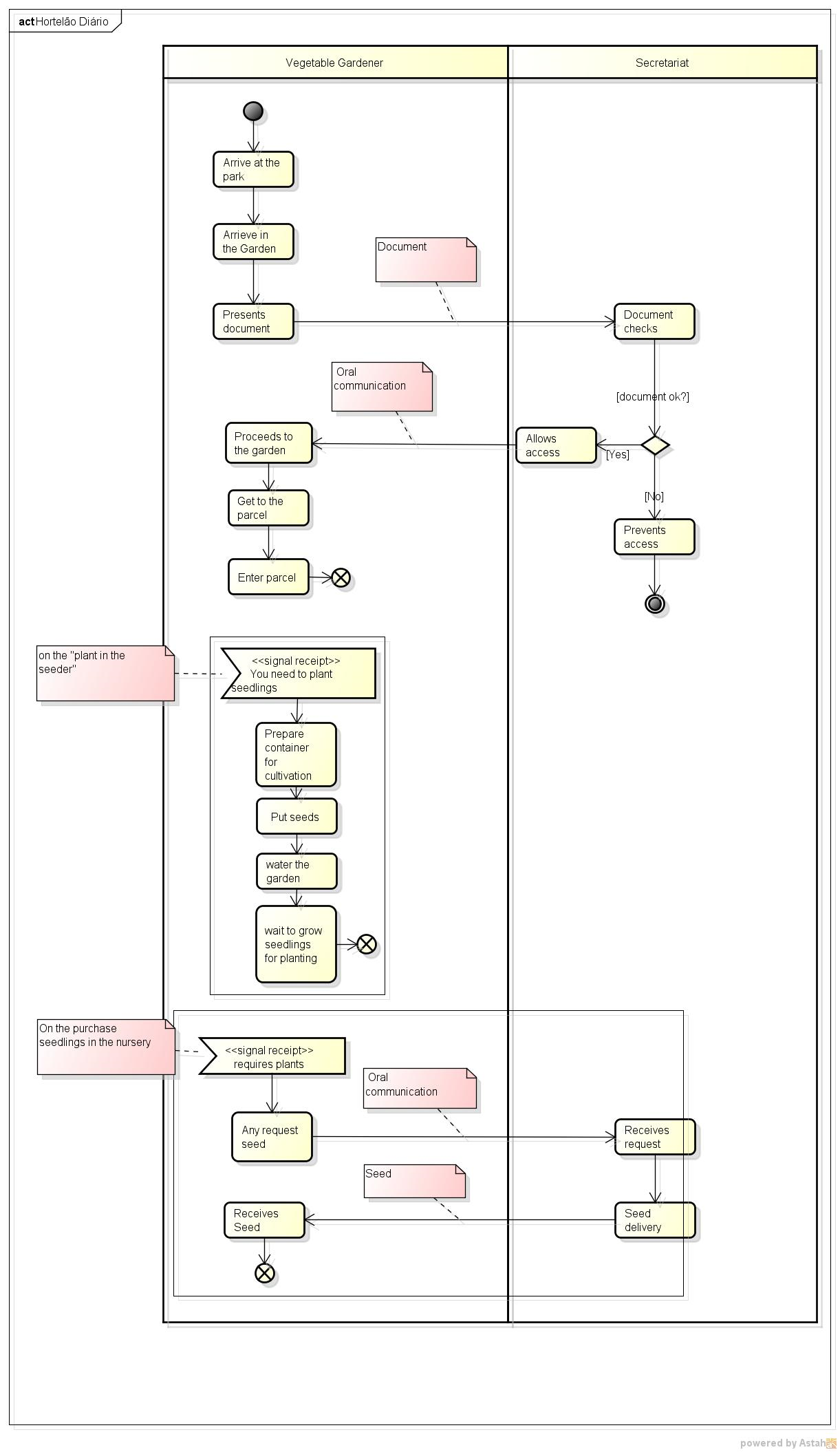
Appendix B. Diagrams of some routines in SJVG
To allow a clear visualization of the interactions between the class instances, we use UML activity diagrams. An Activity Diagram is a diagram defined by the Unified Modeling Language (UML), representing the flows driven by processes. It is essentially a flow chart that shows the flow of control from one activity to another. Usually this involves the modeling of sequential steps in a computational process. In our work, we use these diagrams to visualize the interactions between roles of the SJVG organization.
Figure B.23 is an activity diagram showing interactions between the roles of Auxiliary Vegetable Gardener, Vegetable Gardener and Technician. In the following we explain it briefly.
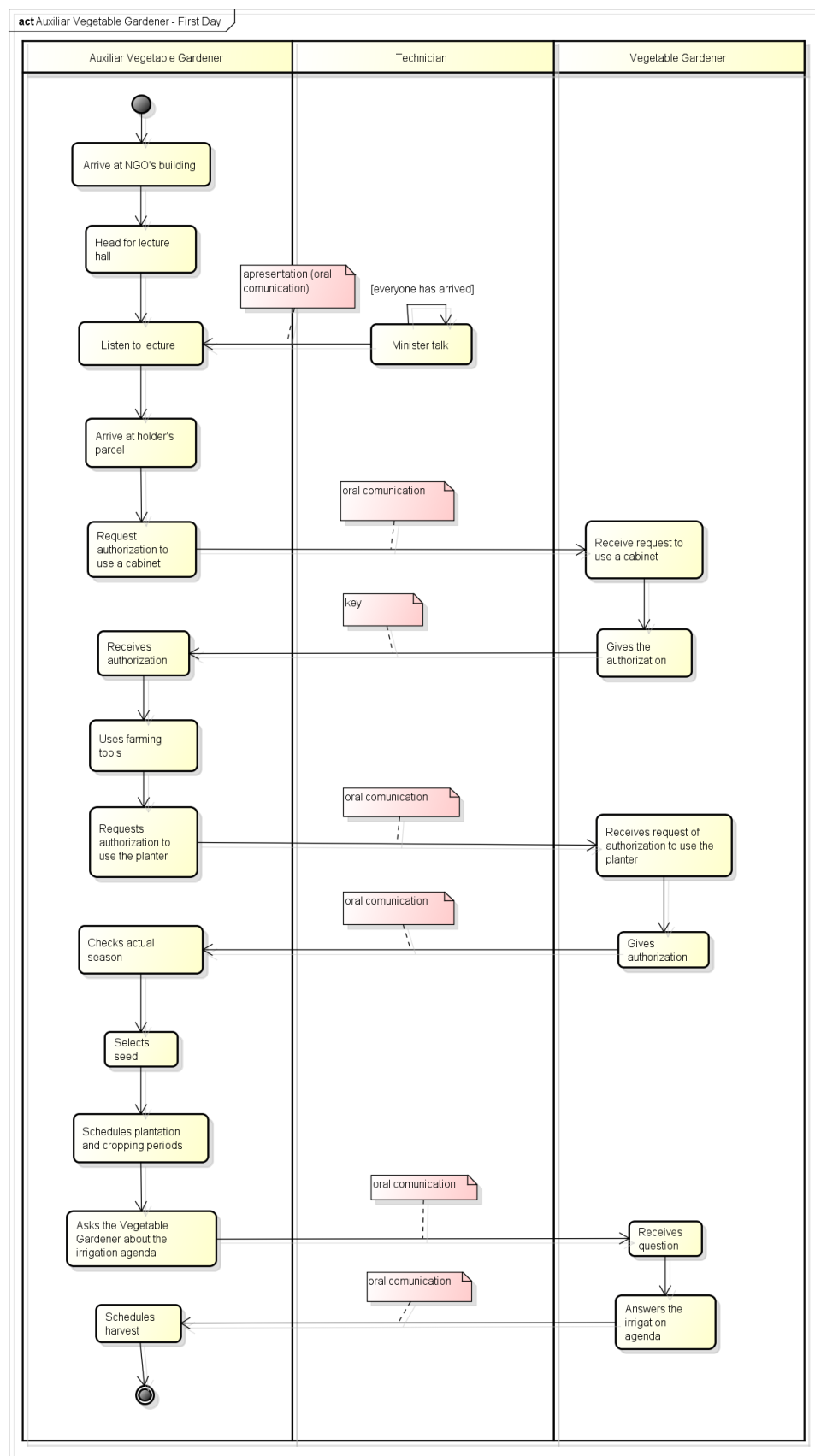
Initially, the agent that assumes the Auxiliary Vegetable Gardener role arrives at the EA’s building, and it listens to a lecture. This lecture is given by another agent, playing the Technician role, who explains some rules on how to harvest adequately. This activity is executed as soon as the Technician agent perceives that everyone has arrived at the hall. The interaction between each role is accomplished through oral communication, in which the latter agent talks to everyone.
Following this interaction, another one is performed between the Auxiliary Vegetable Gardener and the Vegetable Gardener agents. The former requests authorization to use a cabinet, using oral communication. Finally, the latter answers the request giving the other agent permission to use the requested cabinet, giving it the key to access that object.
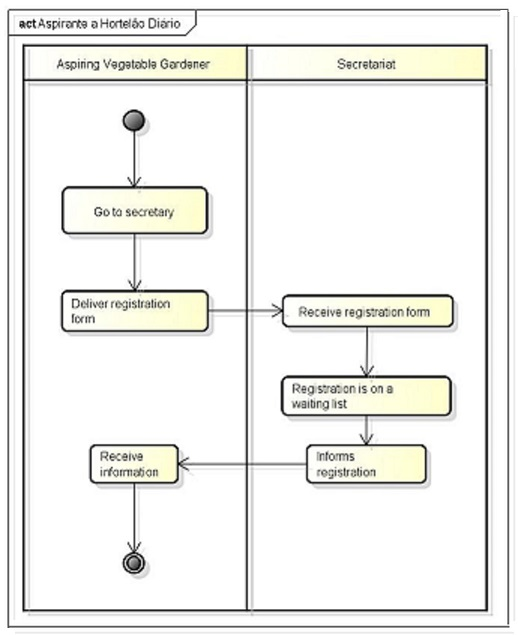
Figures B.24 and B.25 show the diagrams of the inscription in the SJVG Project (of an aspiring gardener) and some daily routines of a gardener, respectively.
References
ADAMATTI, D., DIMURO, G. P., & COELHO, H. (Eds.) (2014). Interdisciplinary Applications of Agent-Based Social Simulation and Modeling. Hershey: IGI Global. [doi:10.4018/978-1-4666-5954-4]
ADAMATTI, D. F., SICHMAN, J. S., BOMMEL, P., DUCROT, R., RABAK, C., & CAMARGO, M. E. S. A. (2005). JogoMan: A prototype using multi-agent-based simulation and role-playing games in water management. In Proceedings of Joint Conference on Multi-Agent Modelling for Environmental Management, CABM-HEMA-SMAGET. Bourg-Saint-Maurice, Les Arcs, France.
ADAMATTI, D. F., SICHMAN, J. S., & COELHO, H. (2009). An analysis of the insertion of virtual players in GMABS methodology using the Vip-JogoMan prototype. Journal of Artificial Societies and Social Simulation, 12 (3), 7: https://www.jasss.org/12/3/7.html.
ALBERTI, M., & WADDELL, P. (2000). An integrated urban development and ecological simulation model. Integrated Assessment, 1, 215–227.
AN, L. (2012). Modeling human decisions in coupled human and natural systems: Review of agent-based models. Ecological Modelling, 229, 25 – 36. [doi:10.1016/j.ecolmodel.2011.07.010]
BALDONI, M., BAROGLIO, C., BERGENTI, F., BOCCALATTE, A., MARENGO, E., MARTELLI, M., MASCARDI, V., PADOVANI, L., PATTI, V., RICCI, A., ROSSI, G., & SANTI, A. (2010). MERCURIO: An interaction-oriented framework for designing, verifying and programming multi-agent systems. In N. Fornara, & G. Vouros (Eds.), Proceedings of the 3rd Multi-Agent Logics, Languages, and Organisations Federated Workshops.
BOISSIER, O., BORDINI, R. H., HÜBNER, J. F., RICCI, A., & SANTI, A. (2013). Multi-agent oriented programming with JaCaMo. Science of Computer Programming, 78, 747 – 761. [doi:10.1016/j.scico.2011.10.004]
BORDINI, R. H., HÜBNER, J. F., & WOOLDRIGE, M. (2007). Programming Multi-agent Systems in AgentSpeak Using Jason. Wiley Series in Agent Technology. hichester: John Wiley & Sons.
CHEN, X., LUPI, F., AN, L., SHEELY, R., VIÑA, A., & LIU, J. (2012). Agent-based modeling of the effects of social norms on enrollment in payments for ecosystem services. Ecological Modelling, 229, 16 – 24. [doi:10.1016/j.ecolmodel.2011.06.007]
DIMURO, G. (2010). Sistemas urbanos: el estado de la cuestión y los ecosistemas como laboratorio. Arquitextos, 124, 11.
DIMURO, G., & JEREZ, E. M. (2010). Comunidades en transición: Hacia otras prácticas sostenibles en los ecosistemas urbanos. Cidades Comunidades e Territórios, 20-21, 87–95.
DIMURO, G., & JEREZ, E. M. (2011). La comunidad como escala de trabajo en los ecosistemas urbanos. Revista Ciencia y Tecnología, 10, 101–116.
DIMURO, G., SOLER, M., & DE MANUEL, E. (2015a). Agroecolog´ıa urbana y producción social del hábitat en defensa del derecho a la ciudad. In J. Escalera, & A. Coca (Eds.), Movimientos sociales, participación y ciudadanía en Andalucía (pp. 221–262). Sevilla: Universidad de Sevilla.
DIMURO, G., SOLER, M., & DE MANUEL, E. (2015b). La agricultura urbana en sevilla: entre el derecho a la ciudad y la agroecología. Hábitat y Sociedad, (pp. 41–64).
DIMURO, G. P. (2011). On interval fuzzy numbers. In 2011 Workshop-School on Theoretical Computer Science, WEIT 2011 (pp. 3–8). Los Alamitos: IEEE.
DIMURO, G. P., COSTA, A. C. R., GONÇALVES, L. V., & HÜBNER, A. (2007). Centralized regulation of social exchanges between personality-based agents. In P. Noriega, J. Vázquez-Salceda, G. Boella, O. Boissier, V. Dignum, N. Fornara, & E. Matson (Eds.), Coordination, Organizations, Institutions, and Norms in Agent Systems II (pp. 338–355). Berlin: Springer.
DIMURO, G. P., COSTA, A. R. C., GONÇALVES, L. V., & PEREIRA, D. (2011). Recognizing and learning models of social exchange strategies for the regulation of social interactions in open agent societies. Journal of the Brazilian Computer Society, 17, 143–161. [doi:10.1007/s13173-011-0035-5]
DIMURO, G. P. & COSTA, A. C. R. (2015). Regulating social exchanges in open mas: The problem of reciprocal conversions between POMDPs and HMMs. Information Sciences, 323, 16 – 33.
EASTON, D. (1965). A Framework for Political Analysis. Englewood Cliffs: Prentice-Hall.
FARIAS, G. P., DIMURO, G., DIMURO, G., & JEREZ, E. D. M. (2013). Exchanges of services based on Piaget’s theory of social exchanges using a BDI-fuzzy agent model. In 2013 BRICS Congress on Computational Intelligence and 11th Brazilian Congress on Computational Intelligence (BRICS-CCI & CBIC), (pp. 653 – 658). Los Alamitos: IEEE.
FILATOVA, T., VERBURG, P. H., PARKER, D. C., & STANNARD, C. A. (2013). Spatial agent-based models for socio-ecological systems: Challenges and prospects. Environmental Modelling & Software, 45, 1 – 7. [doi:10.1016/j.envsoft.2013.03.017]
HÜBNER, J., BORDINI, R. H., GOUVEIA, G. P., PEREIRA, R. H., PICARD, G., PIUNTI, M., & SICHMAN, J. S. (2009). Using jason, moise+, and cartago to develop a team of cowboys. In J. Dix, M. Fisher, & P. Novák (Eds.), Proceedings of 10th International Workshop on Computational Logic in Multi-Agent Systems (CLIMA 2009), Agent Contest (pp. 203–207).
HÜBNER, J. F., BOISSIER, O., KITIO, R., & RICCI, A. (2010). Instrumenting multi-agent organisations with organisational artifacts and agents. Autonomous Agents and Multi-Agent Systems, 20, 369–400. [doi:10.1007/s10458-009-9084-y]
HÜBNER, J. F., SICHMAN, J. S., & BOISSIER, O. (2007). Developing organised multiagent systems using the MOISE+ model: programming issues at the system and agent levels. International Journal of Agent-Oriented Software Engineering, 1, 370–395.
HILL, M. (2009). The Public Policy Process. London: Pearson Longman.
HUYNH, T. D., JENNINGS, N. R., & SHADBOLT, N. R. (2006). An integrated trust and reputation model for open multi-agent systems. Autonomous Agents and Multi-Agent Systems, 13, 119–154.
IWAMURA, T., LAMBIN, E. F., SILVIUS, K. M., LUZAR, J. B., & FRAGOSO, J. M. (2014). Agent-based modeling of hunting and subsistence agriculture on indigenous lands: Understanding interactions between social and ecological systems. Environmental Modelling & Software, 58, 109 – 127. [doi:10.1016/j.envsoft.2014.03.008]
JANSSEN, M. (Ed.) (2003). Complexity and Ecosystem Management: The Theory and Practice of Multi-Agent Approaches. Northampton: Edward Elgar Publishers.
KOUTIVA, I., & MAKROPOULOS, C. (2012). Linking social simulation and urban water modelling tools to support adaptive urban water management. In R. Seppelt, A. A. Voinov, S. Lange, & D. Bankamp (Eds.), Proceedings of iEMSs 2012 International Congress on Environmental Modelling and Software, Managing Resources of a Limited Planet: Pathways and Visions under Uncertainty, Sixth Biennial Meeting (pp. 2471–2479). Leipzig, Germany: International Environmental Modelling and Software Society (iEMSs).
LIU, S., YU, H., MIAO, C., & KOT, A. C. (2013). A fuzzy logic based reputation model against unfair ratings. In Proceedings of the 12th International Conference on Autonomous Agents and Multiagent Systems, AAMAS 2013 (pp. 821–828). New York: IFAAMAS/ACM.
LUCCA, G., SANZ, J., Pereira DIMURO, G., BEDREGAL, B., MESIAR, R., KOLESAROVA, A., & BUSTINCE SOLA, H. (2015). Pre-aggregation functions: construction and an application. IEEE Transactions on Fuzzy Systems, 24, 260-272. [doi:10.1109/TFUZZ.2015.2453020]
MAGLIOCCA, N. R., SHELLEY, M., & SMORUL, M. (2014). Agent-based virtual laboratories for a novel experimental approach to socio-environmental synthesis. In D. P. Ames, N. W. T. Quinn, & A. E. Rizzoli (Eds.), Proceedings of iEMSs 2014 International Congress on Environmental Modelling and Software. San Diego: International Environmental Modelling and Software Society (iEMSs).
MANSON, S. M. (2003). Validation and verification of multi-agent models for ecosystem management. In M. Janssen (Ed.), Complexity and Ecosystem Management: The Theory and Practice of Multi-Agent Approaches (pp. 63–74). Northampton: Edward Elgar Publishers.
MOKOM, F. (2015). Modeling the Evolution of Artifact Capabilities in Multi-Agent Based Simulations. Ph.D. thesis University of Windsor.
ORTIZ, E. (2010). Derecho a la ciudad, producción social y gestión participativa del hábitat. la promoción de iniciativas comunitarias incluyentes en la ciudad de méxico. Hábitat y Sociedad, 1, 55–70.
PELLI, V. (2007). Habitar, participar, pertenecer. Acceder a la vivienda – incluirse en la sociedad. Buenos Aires: Nobuko.
PELLI, V. (2010). La gestión de la producción social del hábitat. Hábitat y Sociedad, 1, 39–54.
PEREIRA, D., GONÇALVES, L., DIMURO, G. P., & COSTA, A. R. C. (2008). Towards the selfregulation of personality-based social exchange processes in multiagent systems. In G. Zaverucha, & A. Costa (Eds.), Advances in Artificial Intelligence - SBIA 2008 (pp. 113–123). Berlin: Springer.
RAI, V., & ROBINSON, S. A. (2015). Agent-based modeling of energy technology adoption: Empirical integration of social, behavioral, economic, and environmental factors. Environmental Modelling & Software, 70, 163 – 177. [doi:10.1016/j.envsoft.2015.04.014]
RAO, A. S., & GEORGEFF, M. P. (1991). Modeling rational agents within a BDIarchitecture. In R. Fikes, & E. Sandewall (Eds.), Proceedings of the 2nd International Conference on Principles of Knowledge Representation and Reasoning (pp. 473–484). San Mateo: Morgan Kaufmann.
REYNOLDS, R., & ZANONI, E. (1992). Why cultural evolution can proceed faster than biological evolution. In Proceedings of International Symposium on Simulating societies (pp. 81–93).
RICCI, A., PIUNTI, M., & VIROLI, M. (2011). Environment programming in multi-agent systems: an artifact-based perspective. Autonomous Agents and Multi-Agent Systems, 23, 158–192.
RICCI, A., VIROLI, M., & OMICINI, A. (2007). Give agents their artifacts: The A&A approach for engineering working environments in MAS. In E. Durfee, M. Yokoo, M. Huhns, & O. Shehory (Eds.), 6th International Joint Conference Autonomous Agents and Multi-Agent Systems (AAMAS 2007) (pp. 601–603). Honolulu: IFAAMAS. [doi:10.1145/1329125.1329308]
RODRIGUES, T. F., COSTA, A. C. R., & DIMURO, G. P. (2013). A communication infrastructure based on artifacts for the JaCaMo platform. In Proceedings of 1st International Workshop on Engineering Multi-Agent Systems at AAMAS 2013, EMAS 2013. Saint Paul, USA: IFAMAS.
SAHRBACHER, C., BRADY, M., CLOUGH, Y., DONG, C., SAHLIN, U., & STJERNMAN, M. (2014). Modelling spatial relationships between ecosystem services and agricultural production in an agent-based model. In D. P. Ames, N.W. T. Quinn, & A. E. Rizzoli (Eds.), Proceedings of iEMSs 2014 International Congress on Environmental Modelling and Software (pp. 1311–1318). San Diego: International Environmental Modelling and Software Society (iEMSs).
SANTOS, F., RODRIGUES, T., DONANCIO, H., SANTOS, I., ADAMATTI, D. F., DIMURO, G. P., DIMURO, G., & JEREZ, E. D. M. (2014a). Towards a multi-agent-based tool for the analysis of the social production and management processes in an urban ecosystem: An approach based on the integration of organizational, regulatory, communication and physical artifacts in the JaCaMo framework. In D. Adamatti, G. P. Dimuro, & H. Coelho (Eds.), Interdisciplinary Applications of Agent-Based Social Simulation and Modeling (pp. 287–311). Hershey: IGI Global.
SANTOS, F. C. P., RODRIGUES, T. F., DIMURO, G., ADAMATTI, D. F., DIMURO, G. P., COSTA, A. C. R., & De Manuel JEREZ, E. (2012). Modeling role interactions in a social organization for the simulation of the social production and management of urban ecosystems: the case of San Jerónimo vegetable garden of Seville, Spain. In 2012 Third Brazilian Workshop on Social Simulation (BWSS) (pp. 136–139). Los Alamitos: IEEE. [doi:10.1109/BWSS.2012.17]
SANTOS, F. C. P., RODRIGUES, T. F., DONANCIO, H., DIMURO, G., ADAMATTI, D. F., DIMURO, G. P., & Manuel JEREZ, E. (2014b). Analyzing the problem of the modeling of periodic normalized behaviors in multiagent-based simulation of social systems: The case of the San Jerónimo vegetable garden of Seville, Spain. In B. Kamínski, & G. Koloch (Eds.), Advances in Social Simulation (pp. 61–72). Berlin: Springer.
SANTOS, I., & COSTA, A. C. R. (2012). Toward a framework for simulating agent-based models of public policy processes on the Jason-CArtAgO platform. In Proceedings of the Second International Workshop on Agent-based Modeling for Policy Engineering in 20th European Conference on Artificial Intelligence (ECAI)- AMPLE 2012 (pp. 45–59). Montpellier: Montpellier University.
SILVA, C., GONCALVES, E., DIMURO, G., DIMURO, G., & De Manuel JEREZ, E. (2013). Modeling agent periodic routines in agent-based social simulation using colored petri nets. In 2013 BRICS Congress on Computational Intelligence and 11th Brazilian Congress on Computational Intelligence (BRICS-CCI & CBIC) (pp. 644–650). Los Alamitos: IEEE.
SUBAGDJA, B., SONENBERG, L., & RAHWAN, I. (2009). Intentional learning agent architecture. Autonomous Agents and Multi-Agent Systems, 18, 417–470. [doi:10.1007/s10458-008-9066-5]
SUN, Z., & MÜLLER, D. (2013). A framework for modeling payments for ecosystem services with agent-based models, bayesian belief networks and opinion dynamics models. Environmental Modelling & Software, 45, 15 – 28.
TSAI, H.-H., & LU, I.-Y. (2006). The evaluation of service quality using generalized Choquet integral. Information Sciences, 176, 640 – 663. [doi:10.1016/j.ins.2005.01.015]
VON LAER, A., DIMURO, G. P., & ADAMATTI, D. (2015). Analysing the influence of the cultural aspect in the self-regulation of social exchanges in MAS societies: an evolutionary game-based approach. In Proceedings of EPIA 2015 - Portuguese Conference on Artificial Intelligence Lecture Notes in Artificial Intelligence. Berlin: Springer.
YU, H., MIAO, C., An, B., SHEN, Z., & LEUNG, C. (2014). Reputation-aware task allocation for human trustees. In Proceedings of the 13th International Conference on Autonomous Agents and Multiagent Systems, AAMAS 2014 (pp. 357–364). New York: IFAAMAS/ACM.
ZADEH, L. A. (2008). Is there a need for fuzzy logic? Information Sciences, 178, 2751–2779.
ZATELLI, M. R., & HÜBNER, J. F. (2014). The interaction as an integration component for the JaCaMo platform. In Proceedings of 2nd InternationalWorkshop on Engineering Multi-Agent Systems at AAMAS 2013, EMAS 2014 (pp. 431–450). Paris: IFAMAS. [doi:10.1007/978-3-319-14484-9_22]